8LW | b | c | d | . | ee | nnn | ff | gg | - | h | ||||||||||||||||
Kühlart / Bauform | ||||||||||||||||||||||||||
Baugröße | ||||||||||||||||||||||||||
Baulänge | ||||||||||||||||||||||||||
Motorgebersystem | ||||||||||||||||||||||||||
Nenndrehzahl | ||||||||||||||||||||||||||
Motoroptionen | ||||||||||||||||||||||||||
Sondermotoroptionen | ||||||||||||||||||||||||||
Motorversion | ||||||||||||||||||||||||||
Bestellschlüssel geben nur in Ausnahmefällen Aufschluss über die möglichen Kombinationen.
Informationen zur Kombinierbarkeit sind im CAD-Konfigurator abrufbar.
Weitere Informationen
Synchronmotoren 8LWA
Allgemeine Motordaten 8LWA
Bestellschlüssel 8LWA
Kühlart / Bauform (b)
Kühlart / Bauform (b)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
 | 8LW Motoren sind nur selbstgekühlt als Kühlart A (8LWA) verfügbar. Die Motoren haben eine schlanke, längliche Bauform und müssen mit dem Anbauflansch, der gleichzeitig auch als Kühlfläche dient, an die Maschine angebaut werden. Die Kühlart wird durch einen Buchstaben (b) in der Bestellbezeichnung gekennzeichnet. |
Kühlart (b) | Anschlusstechnik (siehe Motoroptionen) | |
|---|---|---|
8LWA | selbstgekühlt | Doppel-Winkeleinbaudose |
Einkabellösung (hybrid) - gewinkelt | ||
Einkabellösung (hybrid) - gerade | ||
Baugröße (c)
Baugröße (c)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
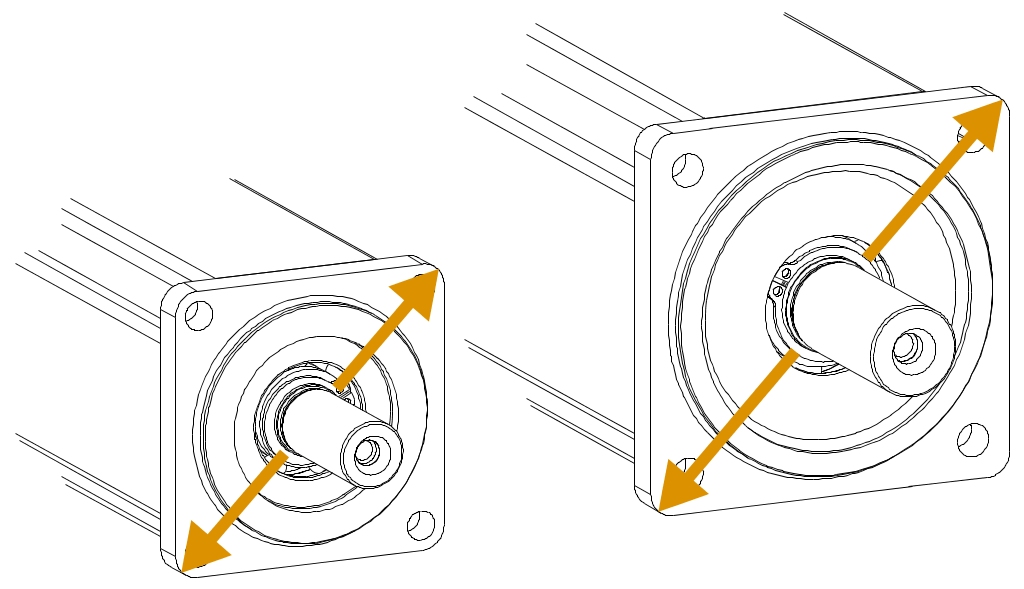 | Servomotoren 8LWA sind in verschiedenen Baugrößen (1, 2, 3) erhältlich. Diese unterscheiden sich in den Abmessungen (insbesondere den Flanschabmessungen) und in den Leistungsdaten. Die Baugrößen werden durch eine Ziffer (c) in der Bestellbezeichnung unterschieden. Je größer diese Ziffer, desto größer sind die Flanschabmessungen und Leistungsdaten des jeweiligen Motors. |
Verfügbarkeit
verfügbare Baugrößen (c) | |||
|---|---|---|---|
8LWA1 | 8LWA2 | 8LWA3 | |
8LWA | Ja | Ja | Ja |
Baulänge (d)
Baulänge (d)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
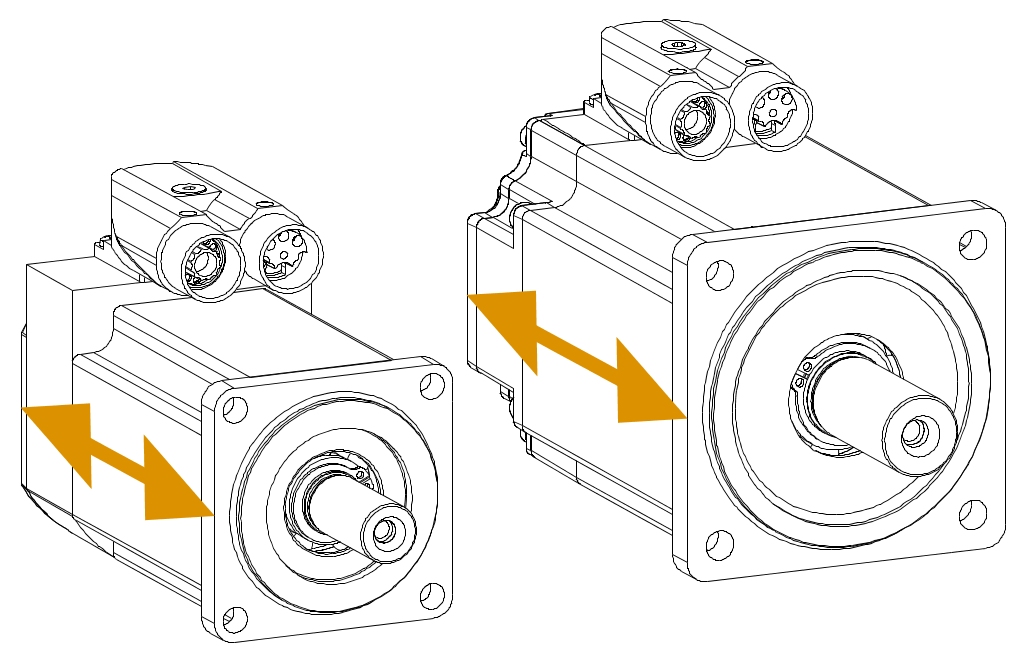 | Servomotoren 8LWA sind in verschiedenen Baulängen erhältlich. Diese unterscheiden sich in den Leistungsdaten bei identischen Flanschabmessungen. Die Baulängen werden durch eine Ziffer (d) in der Bestellbezeichnung unterschieden. Je größer diese Ziffer, desto länger ist der jeweilige Motor. |
Verfügbarkeit
verfügbare Baulängen (d) | ||
|---|---|---|
8LWAx2 | 8LWAx3 | |
8LWA1 | --- | Ja |
8LWA2 | Ja | Ja |
8LWA3 | --- | Ja |
Motorgebersysteme (ee)
Motorgebersysteme (ee)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
Die Motoren sind sowohl mit EnDat Geber als auch mit Resolver lieferbar. Das Gebersystem wird in Form eines zweistelligen Codes (ee) als Teil der Bestellnummer angegeben.
Resolver
Der Resolver ist ein analoges Gebersystem. Resolver zeichnen sich durch hohe Robustheit gegen Vibrationen und hohen Einsatztemperaturen aus. Nachteil ist die geringe Genauigkeit von 6-10 Winkelminuten. Weiterhin ist keine Multiturnvariante mit Resolvern möglich.
Technische Daten | Resolver / Bestellcode (ee) |
|---|---|
R0 | |
Type | RE-15-1-J04 |
Genauigkeit | 10 Winkelminuten |
Vibration in Betrieb | ≤500 m/s² |
Schock in Betrieb | ≤1000 m/s² |
Verfügbarkeit | Verfügbare Resolver / Bestellcode (ee) |
|---|---|
R0 | |
8LWA1 | Ja |
8LWA2 | Ja |
8LWA3 | Ja |
Endat 2.2 Geber
Bei dem weiter entwickelten voll digitalen EnDat 2.2 Protokoll werden die Positionen direkt im Geber gebildet und seriell dem Antriebssystem kommuniziert. Diese Übertragung ist sehr robust gegenüber Störungen und ist sogar für sicherheitsgerichtete Anwendungen zertifiziert.
Technische Daten | Gebertyp / Bestellcode (ee) | |||
|---|---|---|---|---|
B8 | Z8 | B9 | Z9 | |
Funktionsprinzip | induktiv | |||
EnDat Protokoll | 2.2 | |||
Funktionale Sicherheit Siehe Anwenderhandbuch SafeMOTION (MAACPMSAFEMC-GER), Anhang B "Übersicht Sicherheitslevel für die Sicherheitsfunktionen der ACOPOS Produktfamilie", im Downloadbereich der B&R Homepage. | --- | Ja | --- | Ja |
singleturn / multiturn | S | M | ||
Batteriegepuffert | --- | |||
Umdrehungen | 1 | 4096 | ||
Auflösung [Bit single / Bit multiturn] | 19/0 | 19/12 | ||
Genauigkeit [''] | ±120 | |||
Grenzfrequenz ≥ [kHz] | digitale Pos. im Geber | |||
Vibration in Betrieb Stator max [m/s2] | 400 | |||
Vibration in Betrieb Rotor max [m/s2] | 600 | |||
Schock in Betrieb max [m/s2] | 2000 | |||
Herstellerbezeichnung | ECI 1119 FS EnDat22 | EQI 1131 FS EnDat22 | ||
Verfügbarkeit | Verfügbare Geber / Bestellcode (ee) | |||
|---|---|---|---|---|
B8 | Z8 | B9 | Z9 | |
8LWA1 | Ja | Ja | Ja | Ja |
8LWA2 | Ja | Ja | Ja | Ja |
8LWA3 | Ja | Ja | Ja | Ja |
Nenndrehzahl (nnn)
Nenndrehzahl (nnn)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
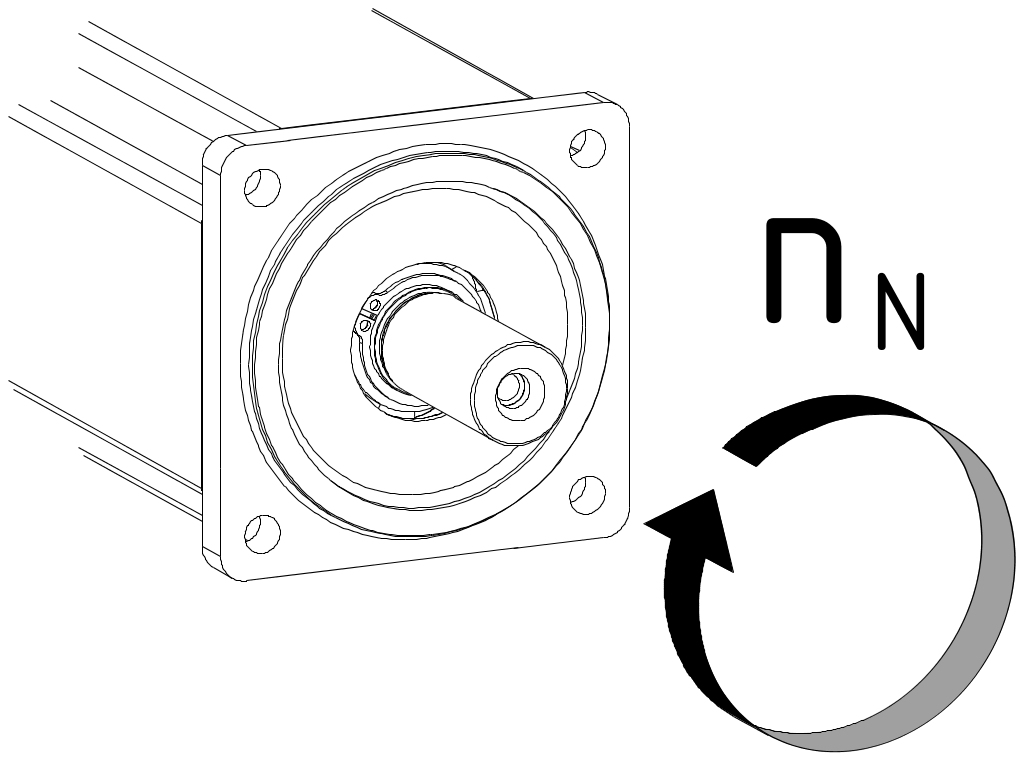 | Servomotoren 8LWA sind mit verschiedenen Nenndrehzahlen erhältlich. Die Nenndrehzahl wird in Form eines dreistelligen Codes (nnn) als Teil der Bestellnummer angegeben. |
Bestellcode (nnn) | ||
|---|---|---|
030 | 045 | |
Nenndrehzahl nN [min-1] | 3000 | 4500 |
Verfügbarkeit
verfügbare Nenndrehzahlen nN [min-1] | ||
|---|---|---|
3000 | 4500 | |
8LWA1 | --- | Ja |
8LWA2 | Ja | Ja |
8LWA3 | Ja | Ja |
Motoroptionen (ff)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
Der entsprechende Code (ff) für den Bestellschlüssel kann der folgenden Tabelle entnommen werden.
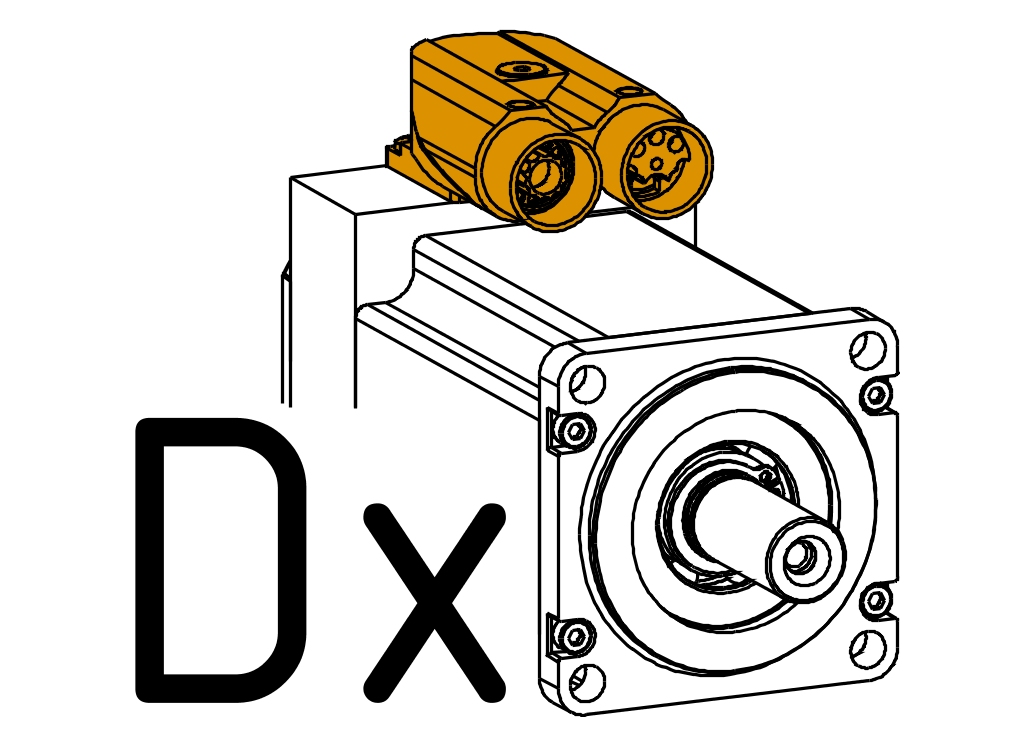
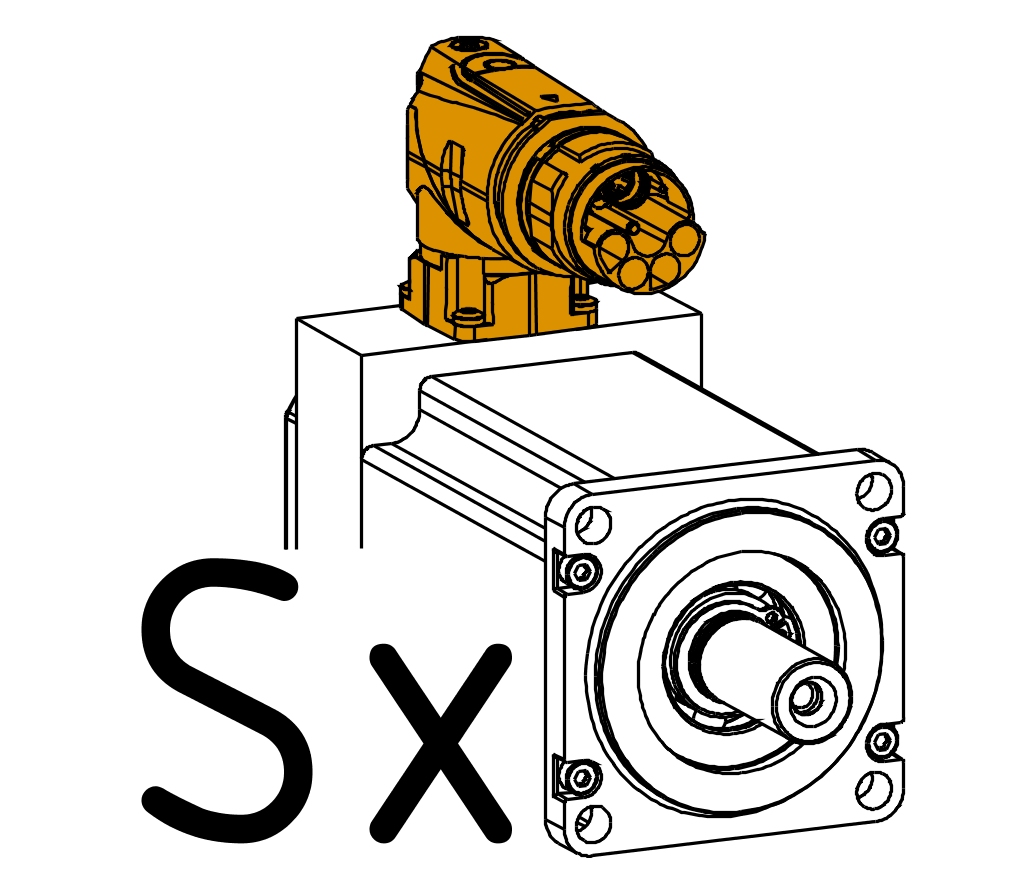
Die erste Stelle im Code (ff) definiert die Anschlussrichtung mit den Möglichkeiten Dx, Sx und Ux. Die zweite Stelle (z. B. x1, x2, x3) definiert alle weiteren Motoroptionen lt. Tabelle.
Doppel-Winkeleinbaudose (drehbar)
Geber- und Leistungsleitung: getrennt mit eigenen Anschlüssen
Motoroption | Verfügbarkeit | Bestellcode (ff) | |||||
|---|---|---|---|---|---|---|---|
Anschlussrichtung | Wellendichtring | Haltebremse | Wellenende | 8LWA1 | 8LWA2 | 8LWA3 | |
 | --- | --- | glatte Welle | Ja | Ja | Ja | D0 |
--- | --- | Welle mit Passfeder | --- | Ja | Ja | D1 | |
--- |  | glatte Welle | Ja | Ja | Ja | D2 | |
--- | Welle mit Passfeder | --- | Ja | Ja | D3 | ||
Ja | --- | glatte Welle | Ja | Ja | Ja | D6 | |
Ja | --- | Welle mit Passfeder | --- | Ja | Ja | D7 | |
Ja | | glatte Welle | Ja | Ja | Ja | D8 | |
Ja | Welle mit Passfeder | --- | Ja | Ja | D9 | ||
Einkabellösung (hybrid) gewinkelt (drehbar)
Geber- und Leistungsleitung: in einem Kabel zusammengefasst
Motoroption | Verfügbarkeit | Bestellcode (ff) | |||||
|---|---|---|---|---|---|---|---|
Anschlussrichtung | Wellendichtring | Haltebremse | Wellenende | 8LWA1 | 8LWA2 | 8LWA3 | |
 | --- | --- | glatte Welle | Ja | Ja | Ja | S0 |
--- | --- | Welle mit Passfeder | --- | Ja | Ja | S1 | |
--- | | glatte Welle | Ja | Ja | Ja | S2 | |
--- | Welle mit Passfeder | --- | Ja | Ja | S3 | ||
Ja | --- | glatte Welle | Ja | Ja | Ja | S6 | |
Ja | --- | Welle mit Passfeder | --- | Ja | Ja | S7 | |
Ja | | glatte Welle | Ja | Ja | Ja | S8 | |
Ja | Welle mit Passfeder | --- | Ja | Ja | S9 | ||
Einkabellösung (hybrid) gerade
Geber- und Leistungsleitung: in einem Kabel zusammengefasst
Motoroption | Verfügbarkeit | Bestellcode (ff) | |||||
|---|---|---|---|---|---|---|---|
Anschlussrichtung | Wellendichtring | Haltebremse | Wellenende | 8LWA1 | 8LWA2 | 8LWA3 | |
 | --- | --- | glatte Welle | Ja | Ja | Ja | U0 |
--- | --- | Welle mit Passfeder | --- | Ja | Ja | U1 | |
--- | | glatte Welle | Ja | Ja | Ja | U2 | |
--- | Welle mit Passfeder | --- | Ja | Ja | U3 | ||
Ja | --- | glatte Welle | Ja | Ja | Ja | U6 | |
Ja | --- | Welle mit Passfeder | --- | Ja | Ja | U7 | |
Ja | | glatte Welle | Ja | Ja | Ja | U8 | |
Ja | Welle mit Passfeder | --- | Ja | Ja | U9 | ||
Anschlussrichtung (ff)
Anschlussrichtung (ff)
Leistungs- und Geberanschluss
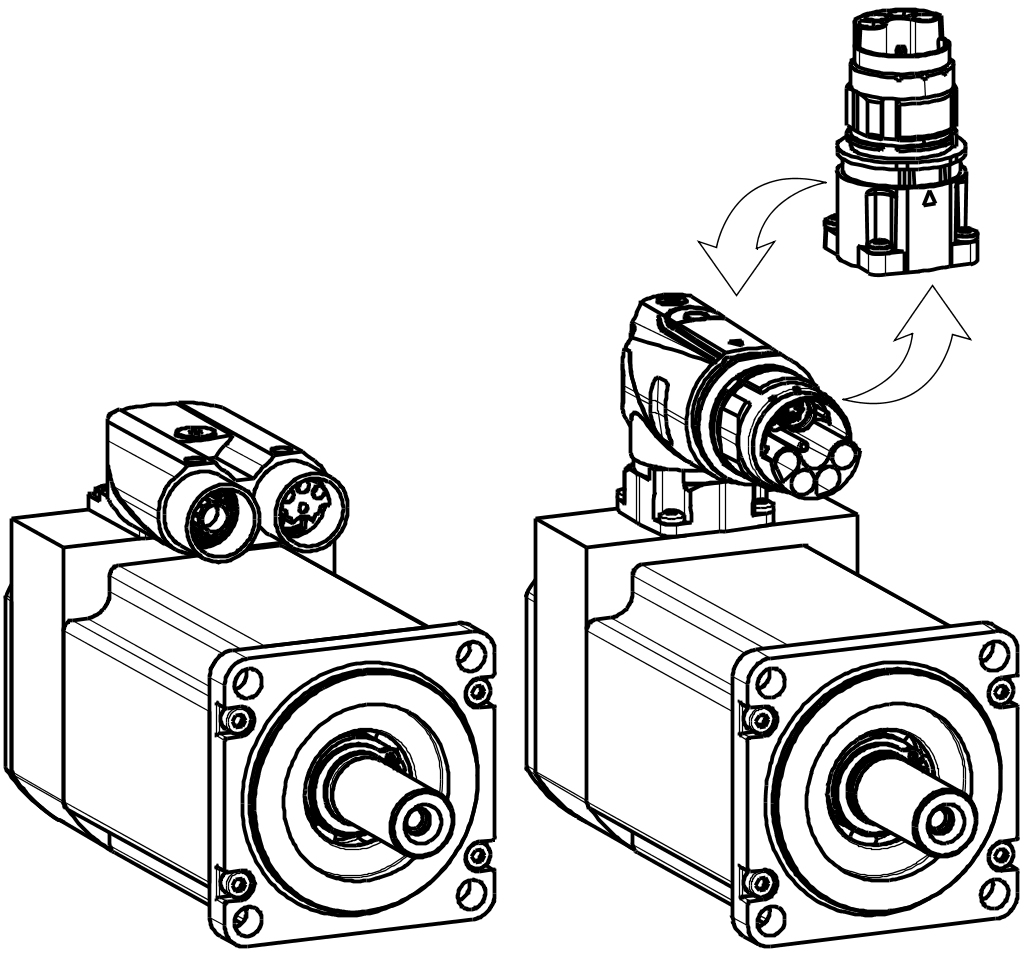
Servomotoren 8LWA sind mit 3 verschiedenen Anschlussoptionen verfügbar.
| Doppel-Winkeleinbaudose Anschlussrichtung: gewinkelt (drehbar 1)) Geber- und Leistungsleitung: getrennt mit eigenen Anschlüssen  |
| Einkabellösung (hybrid) Anschlussrichtung: gewinkelt (drehbar 1)) Geber- und Leistungsleitung: in einem Kabel zusammengefasst  |
| Einkabellösung (hybrid) Anschlussrichtung: gerade Geber- und Leistungsleitung: in einem Kabel zusammengefasst |
| 1) | Prüfen Sie die Winkelangabe am Bild bzw. die Umsetzbarkeit, entsprechend Ihren Anforderungen, mit dem CAD-Konfigurator unter cad.br-automation.com. |
Wellendichtring (ff)
Wellendichtring (ff)
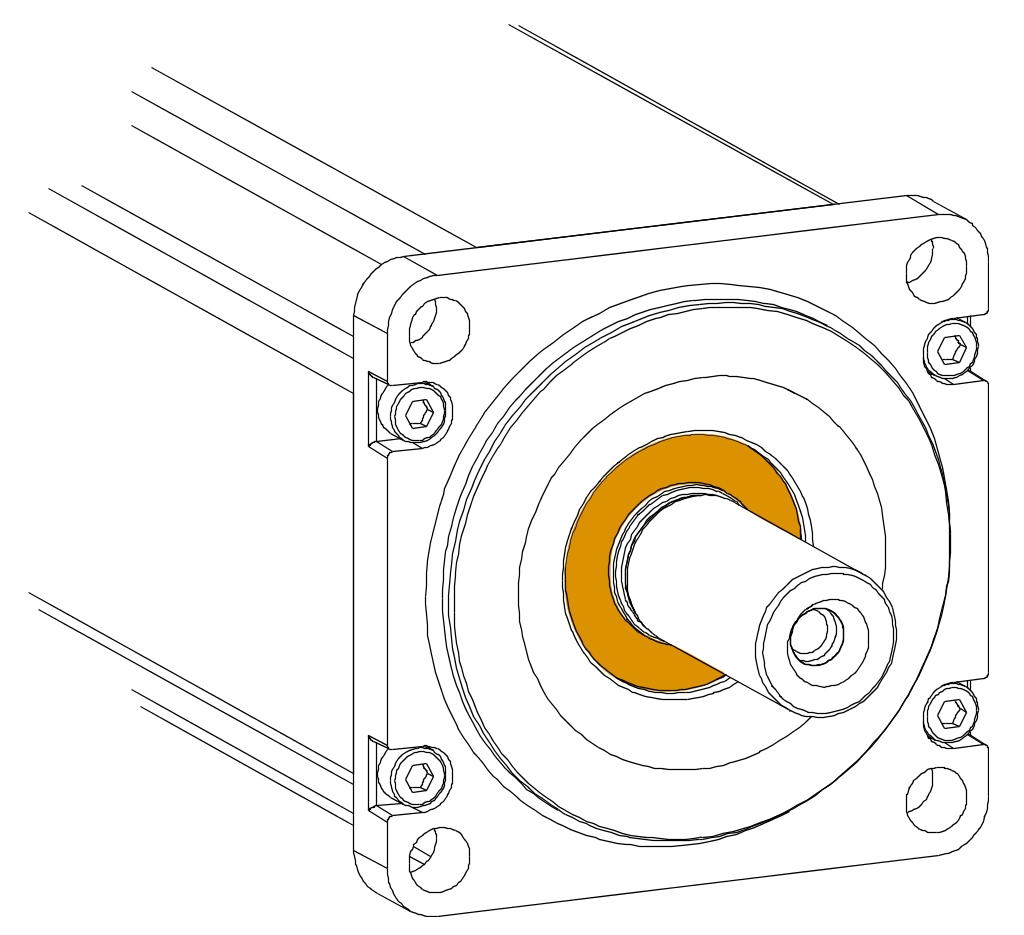 | Servomotoren 8LWA sind optional mit einem Wellendichtring der Form A nach DIN 3760 lieferbar.
|
Wartung
Damit die Funktion des Wellendichtringes auf Dauer gewährleistet ist, muss er regelmäßig mit Öl geschmiert werden. Ein nicht geschmierter Wellendichtring verhärtet durch die erhöhte Reibungswärme und kann dann nur noch die Funktion als Staubschutz auf Dauer gewährleisten.
Haltebremse (ff)
Haltebremse (ff)
 | Servomotoren 8LWA können mit einer Standardhaltebremse geliefert werden. Diese ist direkt hinter dem A-Flansch des Motors eingebaut und dient zum Festhalten der Motorwelle im spannungslosen Zustand des Servomotors. |
Technische Daten
8LWA1 | 8LWA2 | 8LWA3 | |
|---|---|---|---|
Haltemoment MBr [Nm] | 0,35 | 2,2 | 4,0 |
Anschluss-Leistung Pein [W] | 8 | 8,2 | 13,4 |
Höchstdrehzahl nmax [min-1] | 6000 | 12000 | 10000 |
Anschluss-Strom Iein [A] | 0,33 | 0,35 | 0,56 |
Anschluss-Spannung Uein [VDC] | 24 (+6 % / -10 %) | ||
Trägheitsmoment JBr [kgcm²] | 0,013 | 0,12 | 0,38 |
Masse mBr [kg] | 0,1 | 0,19 | 0,29 |
Funktionsprinzip
Die Haltebremse ist eine Permanentmagnetbremse und kann durch B&R Antriebssysteme angesteuert werden. Prinzipbedingt weist dieser Haltebremsen-Typ ein minimales Spiel auf.
Die Bremse ist als Haltebremse konzipiert. Sie darf nicht zum betriebsmäßigen Abbremsen verwendet werden! Die Bremsen besitzen unter Beachtung dieser Randbedingung eine Lebensdauer von ca. 5.000.000 Schaltzyklen (lösen und wieder einfallen lassen ist dabei ein Schaltzyklus). Lastbremsungen im Fall eines Nothaltes sind zulässig - sie reduzieren jedoch die Lebensdauer.
Das erforderliche Haltemoment der Bremse wird auf Basis des auftretenden Lastmoments bestimmt. Ist das Lastmoment nicht ausreichend bekannt, wird empfohlen, einen Sicherheitsfaktor von 2 zu berücksichtigen.
Die Haltebremse ist keine Arbeitsbremse. Durch die Haltebremse ist kein Personenschutz gegeben. Das maximale Motormoment überschreitet das Haltemoment wesentlich.
Wellenende (ff)
Wellenende (ff)
8LWA Servomotoren besitzen Wellenenden nach DIN 748.
Ausführungen
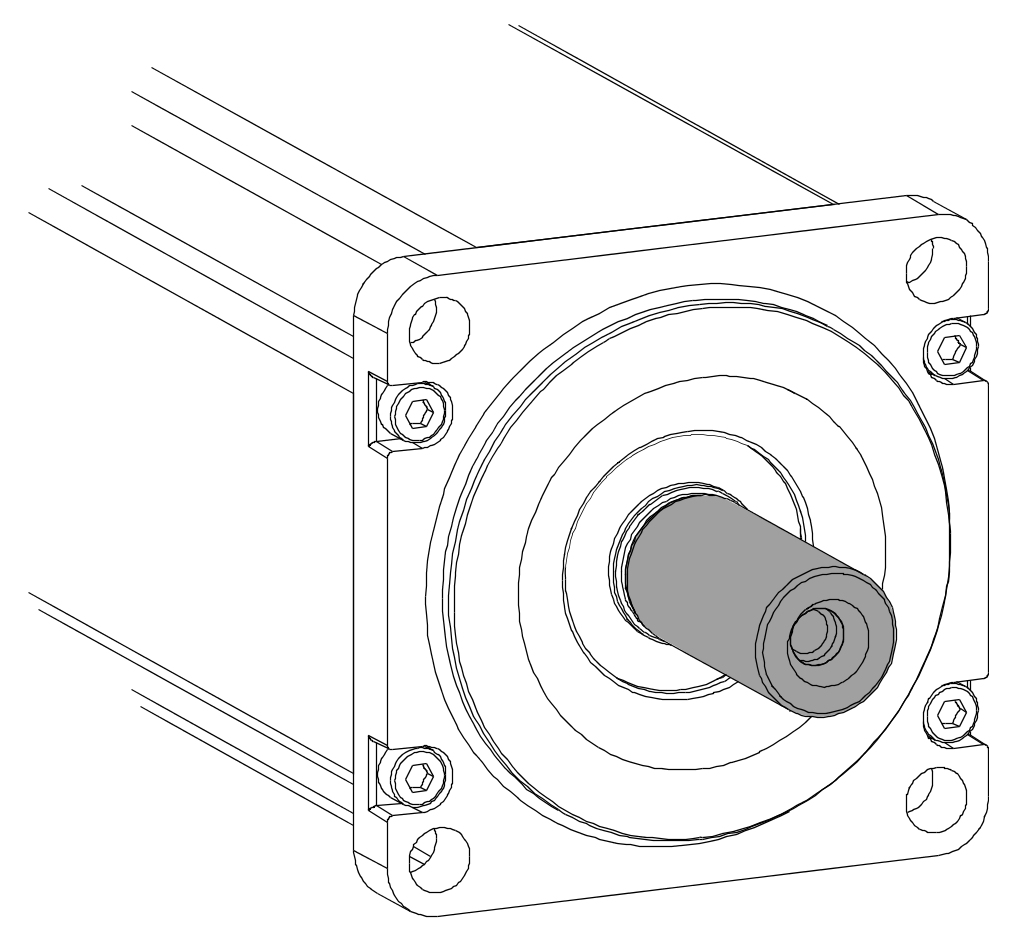 | Glattes Wellenende Das glatte Wellenende wird für eine kraftschlüssige Welle-Nabe-Verbindung verwendet und gewährleistet eine spielfreie Verbindung zwischen Welle und Nabe sowie hohe Laufruhe. An der Stirnseite der Welle ist eine Zentrierbohrung mit Gewinde vorhanden. |
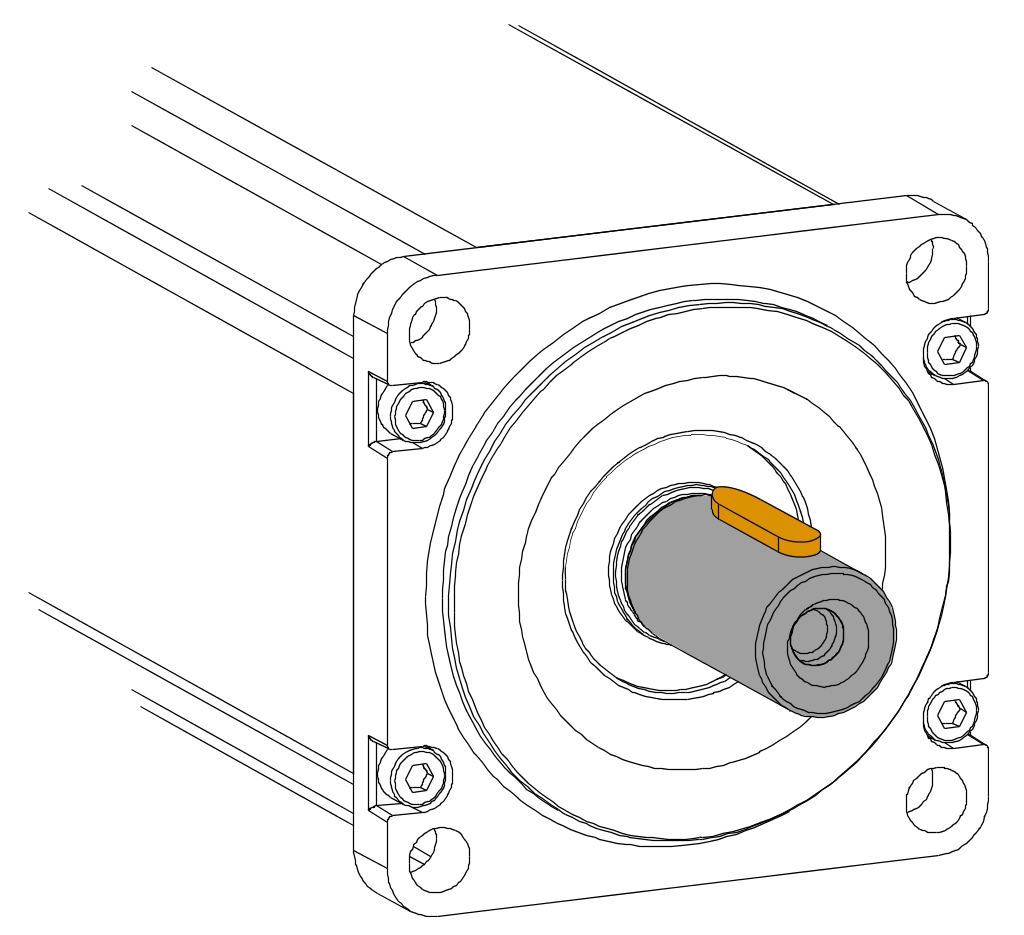 | Wellenende mit Passfeder Das Wellenende mit Passfeder kann für eine formschlüssige Drehmomentübertragung bei geringen Anforderungen an die Welle-Nabe-Verbindung und für die Aufnahme richtungskonstanter Drehmomente verwendet werden. Die Passfedernuten entsprechen der Nutform N1 nach DIN 6885-1. Es werden Passfedern der Form A nach DIN 6885-1 eingesetzt. Die Wuchtung von Motoren mit Passfedernuten erfolgt nach der Halb-Passfeder-Vereinbarung nach DIN ISO 8821. Zur Fixierung von Antriebselementen mit Wellenendscheiben ist an der Stirnseite der Welle eine Zentrierbohrung mit Gewinde vorgesehen. |
Wellenbruch durch starken Reversierbetrieb.
Der Sitz der Passfeder kann bei starkem Reversierbetrieb ausschlagen. Im Extremfall bricht dadurch die Welle!
- Setzen Sie vorzugsweise glatte Wellenenden mit Spannelementen ein.
Motorschaden durch Unwucht.
Werden Motoren, welche ein Wellenende mit Passfeder besitzen, ohne die Passfeder betrieben, so kann dies zu Unwucht und in Folge zu einem Motorschaden führen.
- Setzen Sie in solchen Fällen glatte Wellenenden ein.
Sondermotoroptionen (gg)
Sondermotoroptionen (gg)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
Es sind keine Sondermotoroptionen verfügbar. Gültiger Code (gg) in der Bestellnummer ist 00.
Motorversion (h)
Motorversion (h)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
Die Motorversion wird als Code (h) in der Bestellnummer angegeben. Aktuell ist Motorversion 0 gültig.
Bestellbeispiel 1
Bestellbeispiel 1
Für eine Applikation wurde ein Drehstrom-Synchronmotor des Typs 8LWA22 mit einer Nenndrehzahl von 3000 min-1 ausgewählt.
Der Anschluss soll als Einkabellösung (hybrid) gewinkelt ausgeführt sein. Der Motor soll mit einer Haltebremse ausgerüstet sein, über ein Wellenende mit Passfeder und über einen EnDat singleturn Geber verfügen.
Der Code (ee) für das Gebersystem ist B8.
Der Code (nnn) für die Nenndrehzahl von 3000 min-1 ist 030.
Der Code (ff) für die übrigen Optionen ist S3.
Die Bestellnummer des benötigten Motors lautet daher: 8LWA22.B8030S300-0
Bestellbeispiel 2
Bestellbeispiel 2
Für eine Applikation wurde ein Drehstrom-Synchronmotor des Typs 8LWA33 mit einer Nenndrehzahl von 4500 min-1 ausgewählt.
Der Anschluss soll als Doppel-Winkeleinbaudose ausgeführt sein. Der Motor soll ohne Haltebremse ausgeführt sein, über ein glattes Wellenende und einen Resolver Geber verfügen. Zusätzlich soll der Motor mit einem Wellendichtring ausgestattet sein.
Der Code (ee) für das Gebersystem ist R0.
Der Code (nnn) für die Nenndrehzahl von 4500 min-1 ist 045.
Der Code (ff) für die übrigen Optionen ist D6.
Die Bestellnummer des benötigten Motors lautet daher: 8LWA33.R0045D600-0