Technologia robotyki rozszerza możliwości B&R w zastosowaniach napędowych o rozwiązania wieloosiowe. Napędy można łączyć w grupy, w kinematykę szeregową lub równoległą i sterować poprzez ruch z zadaną ścieżką.
Ruchy po ścieżce są podstawą do precyzyjnych i kompleksowych aplikacji robotycznych. Wspierany jest również szereg metod interpolacji, a także wiele funkcji technologicznych.
Programowanie oparte jest o komponenty mapp Motion, zgodne z blokami PLCopen. Umożliwiają one łatwą integrację z resztą aplikacji robotyki.
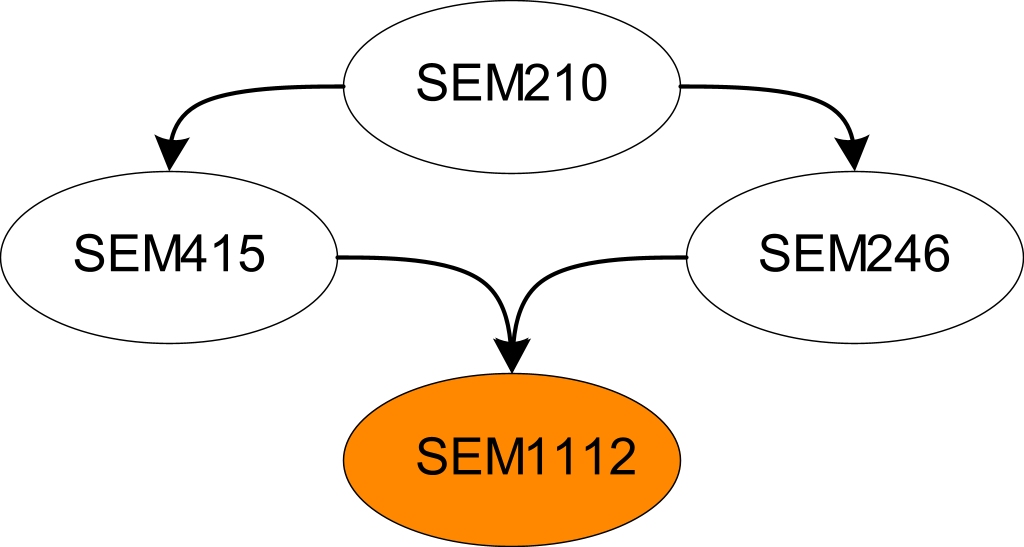
Wymagania | Czas trwania | Numer modelu | |
|---|---|---|---|
Szkolenie Szkolenie Automation Studio: Podstawy [SEM210.2] | 2 dni | SEM1112.2 |  |
Zagadnienia
- Koncepcja grupy osi
- Konfiguracja robota w Automation Studio
- Uruchomienie i diagnostyka robota
- Programowanie robota z użyciem komponentów mapp
- Technologia robotyki
- Programowanie ruchów napędów po zadanej ścieżce
- Tworzenie programów wykonawczych robota
- Komunikacja między aplikacją sterownika, a programem robota
- Użycie układów współrzędnych oraz narzędzi
- Konfiguracja monitorowania obszaru roboczego
Wymagania
- Uczestnicy uruchomią napędy i przeprowadzą ich diagnostykę.
- Uczestnicy będą zarządzać dużą liczbą osi w projekcie automatyki.
- Uczestnicy zintegrują ruch po zadanej ścieżce z projektem automatyki.
- Uczestnicy stworzą algorytm do wykonywania programów robota w systemie sterowania.
