Der Markt fordert kostengünstige Lösungen. B&R bietet hier mit seinen Schrittmotoren eine wirtschaftliche und leistungsstarke Ergänzung zum bestehenden Produktportfolio.
- Hohes Drehmoment
- Große Überlastfähigkeit
- Kostengünstige Geberoption
- Parallel und seriell betreibbar
- Optionale Schutzart IP65
- Optional mit Haltebremse
Schrittmotoren ohne Geber
Schrittmotoren ohne Geber IP65
Schrittmotoren mit Inkrementalgeber IP20
Schrittmotoren mit Inkrementalgeber IP65
Schrittmotoren mit Inkrementalgeber und Bremse IP65
Schrittmotoren mit SSI Geber IP65
Schrittmotoren mit SSI Geber und Bremse IP65
Schrittmotoren mit Hiperface Geber IP65
Inkrementalgeberkabel
Inkrementalgeberkabel M12
SSI Geberkabel
Hiperface Geberkabel
Motorkabel
Motorkabel M12
Motorkabel mit Bremse
Motorkabel Hiperface
Hybrid Kabel
Zubehör
Dokumentation
Schrittmotoren 80MP
Schrittmotoren 80MP sind in verschiedenen Baugrößen (D, F und H) erhältlich. Diese unterscheiden sich in den Abmessungen (insbesondere den Flanschabmessungen) und in den Leistungsdaten.
Online-Tools
CAD-Konfigurator Für Motoren und Getriebe. Unsere CAD-Applikation erlaubt Ihnen den Zugriff auf 2D/3D CAD-Daten in verschiedenen Formaten.
Motordaten
80MPD | 80MPF | 80MPH | |
|---|---|---|---|
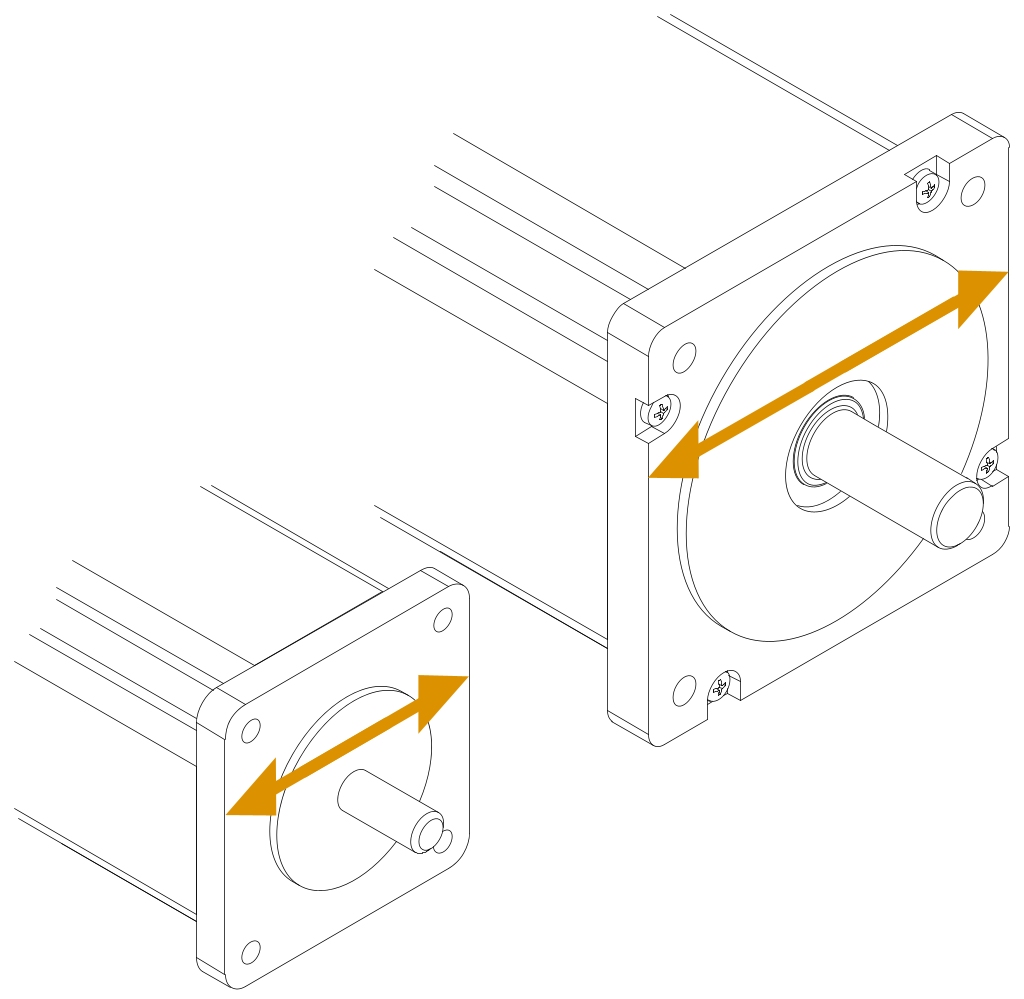
Flanschmaß | 56,4 mm (NEMA 23) | 60 mm | 87,1 mm (NEMA 34) |
Haltemoment | 1,1 bis 3,0 Nm | 1,15 bis 3,5 Nm | 4,0 bis 13,6 Nm |
Stillstandsmoment | 0,8 bis 2,2 Nm | 0,81 bis 2,5 Nm | 2,9 bis 9,3 Nm |
Wellenausführung | Abgeflachte Welle (D-cut) | Welle mit Passfeder (ANSI 4.1) | |
Einsatzgebiete
Einsatzgebiete
Weltweit werden derzeit jährlich über 500 Millionen Schrittmotoren verbaut. Obwohl der Einsatz in den meisten Fällen sehr einfachen Applikationen vorbehalten ist, steigt die Verbreitung stetig auch in Applikationen, die bisher Gleichstrom- und BLDC Motoren vorbehalten waren. Hochwertige Ansteuerungen ermöglichen zunehmend die Lösung komplexerer Aufgaben. Viele Anwendungen, die in der Vergangenheit mit kleineren Servomotoren gelöst wurden, können mit entsprechender Elektronik auch von einem Schrittmotor bewältigt werden. Nicht nur die Möglichkeiten der Ansteuerung haben sich in den letzten Jahren weiterentwickelt, auch die Motoren selber sind durch den Einsatz verbesserter Technologien wesentlich laufruhiger und drehmomentstärker geworden. Neue, robuste und auch kostengünstige Möglichkeiten von Positionsrückführungen tragen ebenfalls ihren Teil dazu bei, Einsatzbereiche für Schrittmotoren ständig zu erweitern. Schrittmotorlösungen sind selbstverständlich auch Grenzen gesetzt. Insbesondere hohe Drehzahlen, die für Servos noch lange kein Problem sind, bedeuten oft das Aus einer Realisierungsmöglichkeit mit einem Schrittmotor. Geht es dabei jedoch um Getriebelösungen, eröffnen sich vielfach Chancen, mit einer kleineren Übersetzung oder aber auch ganz ohne Getriebe auszukommen. Grund dafür ist das hohe Drehmoment, welches mit Schrittmotoren im kleinen bis mittleren Drehzahlbereich erreicht werden kann.
Auswahl des richtigen Motors
Auswahl des richtigen Motors
Bei der Auswahl eines Motors kann es für den Anwender viele Hürden geben. Die Unterschiede von Motoren verschiedener Hersteller oder auch zwischen Motorgenerationen sind teilweise sehr groß. Die Standardangaben in den Datenblättern sind für die richtige Motorauswahl oft zu wenig. Nur ausführliche Informationen können mögliche Einsatzbereiche optimal aufzeigen. Parameter wie Rundlauf, Gegen-EMK, Wirkungsgrad, Resonanzfrequenzen etc. gewinnen mit der Komplexität der Applikation immer mehr an Bedeutung. Bei sorgfältiger Auswahl können Schrittmotoren für weitaus mehr Applikationen eingesetzt werden, als das heute der Fall ist. Dazu ist es notwendig, auf die für die jeweiligen Anwendungen besonders wichtigen Eigenschaften zu achten. Oft sind diese erst in Kombination mit dem Verstärker erreichbar.
Rundlauf und Winkelgenauigkeit
Rundlauf und Winkelgenauigkeit
Ein Großteil der 2-Phasen Hybridschrittmotoren weist einen Schrittwinkel von 1,8 Grad auf. Daneben gibt es aber auch noch Versionen mit 0,9 Grad und selten sogar welche mit 0,45 Grad. Der kleinere Schrittwinkel hat oft einen schlechteren Drehmomentverlauf zur Folge. Viel exakter lässt sich dann nur noch mit Schrittmotor Treibern positionieren, die Mikrosteps unterstützen. Eine hohe Schrittauflösung ergibt überdies hervorragende Rundlaufeigenschaften und reduziert mögliche Probleme von Resonanzerscheinungen.
Positionsgenauigkeit
Positionsgenauigkeit
Wie genau die Sollposition jedoch letztendlich erreicht wird, hängt vom anliegenden Lastmoment und außerdem von der Fertigungsgenauigkeit des Schrittmotors ab. Die Positionsgenauigkeit innerhalb eines Schrittes ist immer von der Last und dem daraus resultierenden Winkelschlupf abhängig. Dieser kann jedoch nie höher als ein Vollschritt sein, da der Motor sonst außer Tritt kommt und Schritte verliert. Diesen Lastwinkel zu kompensieren funktioniert am besten über eine Rückführung der Position. Aus diesem Grund sind alle B&R Schrittmotoren auch als günstige Gebervariante verfügbar, die eine Auflösung von bis zu 12 Bit erreichen. Positioniergenauigkeiten, auch bei wechselnden Lastmomenten, sind dadurch mit Winkelabweichungen von weniger als 0,1 Grad möglich.