Las impresoras 3D con las que la mayoría de nosotros estamos familiarizados utilizan materiales en polvo y plásticos. Por otro lado, adaptar el diseño para imprimir una casa implica bastante más que la simple sustitución de estos materiales por hormigón convencional. La mezcla de cemento por sí sola supone un enorme desafío. Debe ser lo suficientemente flexible como para trabajar, pero también debe solidificarse lo bastante rápido como para soportar las capas posteriores. El hormigón ordinario se endurece durante 28 días, pero la estructura impresa debe ser capaz de sostenerse inmediatamente.
Otra dificultad importante es dotar al robot de la capacidad de imprimir paredes con prácticamente cualquier curvatura, incluidos los puntos de inflexión, así como de implementar ángulos agudos e interrupciones. "Esto es importante para que podamos dar a los arquitectos la máxima libertad", afirma uno de los principales diseñadores del Con4Bot, el profesor titular del Instituto de Mecatrónica e Ingeniería Informática de la TUL, Václav Záda. Gracias al diseño del Con4Bot, cuando el efector final deja de imprimir brevemente, por ejemplo para dejar espacio para una puerta o ventana, el resto del robot puede seguir moviéndose. "El robot tiene un gran tamaño y puede mantener su considerable energía cinética", dice Záda, "y eso es algo que otras máquinas no pueden hacer".
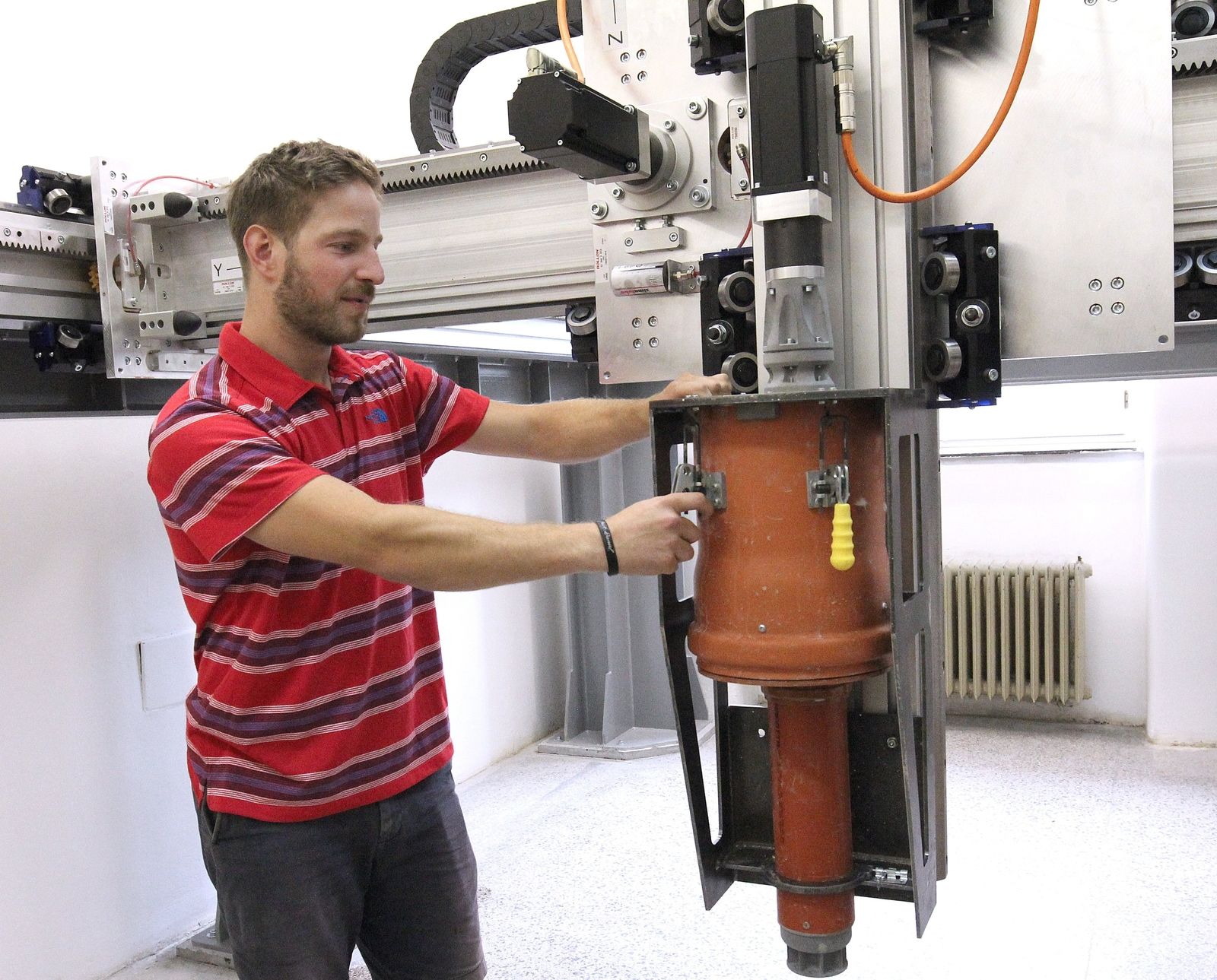
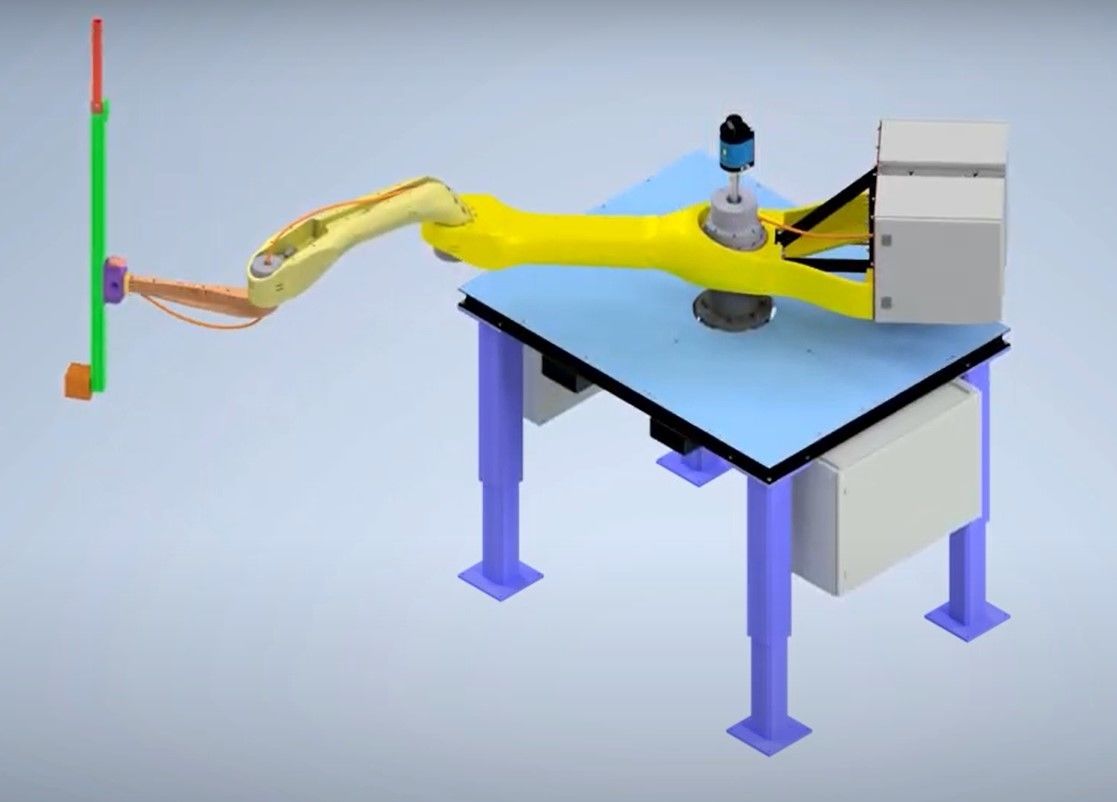
Cuando esté terminada, la Printing Mantis será un brazo robótico giratorio y deslizante con un alcance horizontal de hasta 5,6 metros y un alcance vertical de 3,3 metros. El proyecto se lleva a cabo mediante dos configuraciones de prueba. La primera configuración es un robot SCARA. Actualmente se está probando a escala 1:4, y la versión a escala real se transportará posteriormente con un camión de obras estándar. La segunda configuración es un robot cartesiano en el Instituto Klokner de Praga, donde los investigadores están probando y desarrollando el cabezal de impresión junto con diferentes mezclas de materiales de construcción.