Tipo de resfriamento/ contrução (b)
Tipo de resfriamento/ contrução (b)
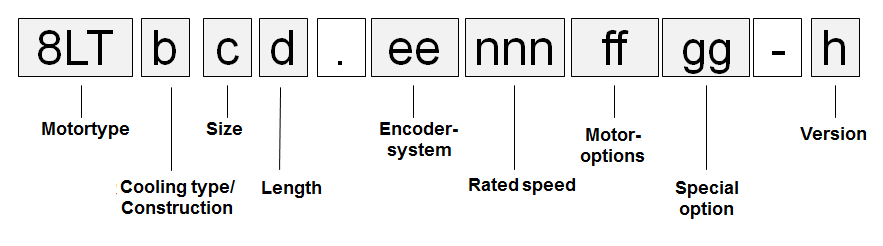
Motores 8LTA são equipados com auto-resfriamento e são equipados com uma flande de saída ISO. Os motores devem ser instalados em uma superfície de resfriamento (flange).
Motores 8LTJ são baseados em motores com resfriamento do tipo A e são de resfrigeração líquida. A refrigeração líquida aumenta o torque nominal (MN), corrente nominal (IN), torque de stall (parado) (M0) e a corrente de stall (parado) (I0) em 70% se comparado com os mesmo motores com resfriamento do tipo A.
Motores 8LTQ são auto-refrigerados e possuem um eixo com furo cego. Os motores devem ser instalados em uma superfície de resfriamento (flange).
Motores 8LTS são baseados em motores com resfriamento do tipo Q e são de resfrigeração líquida. A refrigeração líquida aumenta o torque nominal (MN), corrente nominal (IN), torque de stall (parado) (M0) e a corrente de stall (parado) (I0) em 70% se comparado com os mesmo motores com resfriamento do tipo Q.
Tamanho (c)
Tamanho (c)
Motores síncronos trifásicos 8LT estão disponíveis nos tamanhos 9 e C.
Tipo de resfriamento | Tamanhos disponíveis | |
|---|---|---|
9 | C | |
A | Sim | Sim |
J | Sim | Sim |
Q | Sim | Sim |
S | Sim | Sim |
Comprimento (d)
Comprimento (d)
Motores síncronos trifásicos 8LSN estão disponíveis em até 6 comprimentos diferentes. Eles têm potências diferentes, com idênticas dimensões de flange. Os comprimentos diferentes podem ser diferenciados por um número (d) no número do modelo (3, 4, 5, 6, 7, 8).
Comprimento | Disponíveis para o tamanho | |
|---|---|---|
9 | C | |
3 | Sim | Sim |
4 | Sim | Sim |
5 | Sim | Sim |
6 | Sim | Sim |
7 | Sim | Sim |
8 | --- | Sim |
Sistema de encoder (ee)
Sistema de encoder (ee)
Encoders EnDat
EnDat é um padrão desenvolvido por Johannes Heidenhain GmbH (www.heidenhain.de), incorporando as vantagens da medição de posição absoluta e incremental e oferecendo também uma leitura/escrita de parâmetros na memória do codificador. Com a medição de posição absoluta (posição absoluta é lida em série), o procedimento de "homing" geralmente não é necessária. Quando necessário, um encoder multi-giro (4096 revoluções) deve ser instalado. Para economizar custos, um econder de giro único e um fim de curso pode também ser usado. Nesse caso, o procedimento de "homing" deve ser realizado. O processo incremental permite curtos tempos de atraso necessários para medição de posição com excepcionais propriedades dinâmicas. Com o sinal senoidal incremental e a boa resolução do módulo EnDat, uma resolução de posicionamento muito elevada é atingida, mesmo utilizando frequências de sinal moderado.
Diferente tipos de encoders EnDat podem ser utilizados dependendo dos requerimentos:
Nome | Código do produto (ee) | |
|---|---|---|
E6 | E7 | |
Tipo de encoder | EnDat única-volta | EnDat multi-voltas |
Funcionalidade | Ótico | Ótico |
Protocolo EnDat | EnDat 2.1 | EnDat 2.1 |
Resolução | 2048 linhas | 2048 linhas |
Revoluções | --- | 4096 |
Precisão | ±20“ | ±20“ |
Frequência limite | ≥ 400 kHz (-3 dB) | ≥ 400 kHz (-3 dB) |
Vibração durante a operação | ≤150 m/s² (IEC 60 068-2-6) | ≤150 m/s² (IEC 60 068-2-6) |
Impacto durante operação | ≤1000 m/s² (IEC 60 068-2-27) | ≤1000 m/s² (IEC 60 068-2-27) |
Fabricante Endereço na internet | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Código do produto do fabricante | ECN1313 | EQN1325 |
Encoder EnDat 2.2
Informações gerais
Sistemas digitais de drive e malhas de controle de posição com dispositivos de medição de posição para determinação dos valores de medidas requerem fácil e altamente segura transferência de dados, a partir dos dispositivos de medição. Além disso, outros dados, como unidade de características específicas, tabelas de correção, etc, devem também estar disponíveis. Para garantir um elevado nível de segurança no sistema, os dispositivos de medição devem ser integradas em rotinas para detectar erros e terem a capacidade de realizar diagnósticos.
A interface EnDat da HEIDENHAIN é uma interface digital e bidirecional para dispositivos de medição. Ele é capaz de produzir valores de posição nos dispositivos de medição incremental e absoluto, além também de pode ler e atualizar as informações sobre o dispositivo de medição ou armazenar novos dados lá. Apenas 4 sinais de linha são necessário na transfêrencia de dados serial. Os dados são transferidos sincronicamente com o sinal do clock, definido por eletrônica subsequentes. O método de transferência usada (ex. para valores de posição, parâmetros, diagnósitcos, etc.) é selecionado utilizando os modos de comandos enviados para o dispositivo de medição pelo sistema eletrônico subseqüentes..
Dados técnicos
Encoders EnDat 2.2 (uma-volta ou multi-voltas) podem ser usados, dependendo da aplicação.
Nome | Código do produto (ee) | |
|---|---|---|
D0 | D1 | |
Tipo de encoder | EnDat única-volta | En Dat multi-voltas |
Funcionalidade | Ótico | Ótico |
Protocolo EnDat | EnDat 2.2 | EnDat 2.2 |
Valores de posição por revolução | 33 554 432 (25-bit) | 33 554 432 (25-bit) |
Revoluções reconhecíveis | --- | 4096 |
Precisão | ± 20" | ± 20" |
Vibrações durante operação1) | ≤ 300 m/s2 (IEC 60 068-2-6) | ≤ 300 m/s2 (IEC 60 068-2-6) |
Impacto durante a operação Duração 6 ms | ≤ 1000 m/s2 / ≤ 2000 m/s2 (IEC 60 068-2-27) | ≤ 1000 m/s2 / ≤ 2000 m/s2 (IEC 60 068-2-27) |
Fabricante Homepage | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Identificação do fabricante | ECN 1325 | EQN 1337 |
| 1) | Válido de acordo com a norma, à temperatura ambiente; até 100°C é válido como termperatura de trabalho: ≤ 300 m/s2, até 115°C: ≤ 150 m/s2; 10 até 55 Hz constante 4.9 mm pico a pico |
Encoder EnDat 2.2 – Segurança de sistemas relacionados com a medição de posição
Informações gerais
Na máquina e no sistema de produção, o tópico de segurança está ficando cada vez mais importante. Isso se reflete na legislação e critérios mais rigorosos de segurança em normas nacionais e internacionais. Mais importante ainda, os rigorosos requisitos servem não só para proteger o pessoal, mas também para cada vez mais proteger a propriedade e o meio ambiente. O objetivo da segurança funcional é minimizar ou eliminar situações perigosas que podem ocorrer em máquinas e sistemas com ou sem erros operacionais. Isto é geralmente se consegue através da implementação de sistemas redundantes. Eixos móveis em aplicações com segurança orientada exigem informações de posição, a fim de ser capaz de desempenhar suas correspondentes funções de segurança. Diferentes sistemas de configuração podem ser implementados para obter valores de posição independentes. Uma possibilidade é utilizar dois dispositivos de medição por eixo. Para manter os custos baixos, o objetivo, é muitas vezes, criar uma solução com apenas um dispositivo de medição de posição. Até agora, os dispositivos de medição de sinais analógicos com seno/cosseno foram utilizados para esta finalidade.
HEIDENHAIN é agora o primeiro fabricante a oferecer segurança relacionados com os sistemas de medição de posição, com um único encoder na solução, com a transferência de dados em série para a segurança de aplicações orientadas de acordo com a norma IEC 61 508 SIL2. Todas as vantagens de transferência de dados em série - como a otimização de custos, possibilidades de diagnóstico, comissionamento automático e geração de valores de posição em alta velocidade - agora também pode ser usado em aplicações de segurança.
Áreas de uso
Os sistemas de segurança de leitura de posição da HEIDENHAIN são projetados para poderem usar apenas um encoder nas aplicações com categoria de controle SIL-2 (de acordo com IEC 61 508). Isso corresponde ao nível de desempenho "d" na ISO 13 849 e categoria 3 na EN 954-1. As funções do sistema de segurança relacionadas com a leitura da posição podem, portanto, ser utilizadas ao longo de todo o sistema para as funções de segurança que se seguem:
- Parada Segura 1 (SS1)
- Parada Segura 2 (SS2)
- Operação Segura de Parada (SOS)
- Limitação de Velocidade Segura (SLS)
- Intervalo Limitado Seguro (SLI)
- Direção Segura (SDI)
- Posição Segura Limitada (SLP)
100 % verificado na fabricação e etapas adicionais durante os testes finais asseguram que erros relacionados com o eixo e a conexão com o acoplamento em não ocorram ao utilizar motores com encoders (S0/S1, de acordo com a norma EN ISO 13849-2).
Dados técnicos
Encoders de segurança EnDat 2.2 (giro único e multi-giro) podem ser usados dependendo da aplicação.
Nome | Código do produto (ee) | |
|---|---|---|
S0 | S1 | |
Tipo de encoder | EnDat giro único com funcionalidade de segurança | EnDat multi-giro com funcionalidade de segurança |
Funcionalidade | Ótico | Ótico |
Protocolo EnDat | EnDat 2.2 | EnDat 2.2 |
Valores de posição por revolução | 33 554 432 (25-bit) | 33 554 432 (25-bit) |
Revoluções reconhecíveis | --- | 4096 |
Precisão | ± 20" | ± 20" |
Vibrações durante operação1) | ≤ 300 m/s2 (IEC 60 068-2-6) | ≤ 300 m/s2 (IEC 60 068-2-6) |
Impacto durante a operação Duração 6 ms | ≤ 1000 m/s2 / ≤ 2000 m/s2 (IEC 60 068-2-27) | ≤ 1000 m/s2 / ≤ 2000 m/s2 (IEC 60 068-2-27) |
Fabricante Homepage | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Identificação do fabricante | ECN 1325 | EQN 1337 |
| 1) | Válido de acordo com a norma, à temperatura ambiente; até 100°C é válido como termperatura de trabalho: ≤ 300 m/s2, até 115°C: ≤ 150 m/s2; 10 até 55 Hz constante 4.9 mm pico a pico |
Velocidade nominal (nnn)
Velocidade nominal (nnn)
Motores síncrons trifásicos 8LT podem ser entregues com três diferentes velocidades nominais:
Tamanho | Velocidades nominais disponíveis nN [min-1] | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
80 / 100 | 300 | 500 | 1000 | |||||||||||||||||||
9 | --- | --- | --- | --- | --- | --- | Sim | Sim | Sim | Sim | Sim | --- | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim |
C | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | Sim | --- | --- | --- | --- | --- |
Comprimento | 3 | 4 | 5 | 6 | 7 | 8 | 3 | 4 | 5 | 6 | 7 | 8 | 3 | 4 | 5 | 6 | 7 | 3 | 4 | 5 | 6 | 7 |
Selo de óleo (ff)
Selo de óleo (ff)
Todos os motores síncronos trifásicos 8LT estão disponíveis com a opcional forma A de vedação de óleo de acordo com a norma DIN 3760. Quando equipados com a vedação de óleo, os motores têm proteção IP65 de acordo com EN 60034-5.
Lubrificação adequada da vedação do óleo deve ser garantida ao longo da vida inteira do motor.
Opções especiais de motor (gg)
Opções especiais de motor (gg)
00...Nenhuma opção especial
Versões de motor (h)
Versões de motor (h)
A versão do motor é automaticamente especificada pelo configurador e pode ser vista nos dados técnicos.
Código de pedido das opções de motor (ff)
O respectivo código (ff) para nomenclatura do produto pode ser achado na tabela seguinte:
Opções do motor | |||
|---|---|---|---|
Eixo | Direção da conexão | Vedação do óleo | Código para pedido (ff) |
ISO / blind hole | Conectores de motores e encoders - angulado (giratório) | Não | F0 |
Sim | F3 | ||
Conector do motor - reto, Conector do encoder - giratório (angulado) | Não | F6 | |
Sim | F9 | ||
Exemplo, Pedido 1
Exemplo, Pedido 1
Um motor de torque (tipo 8LTA93) com velocidade nominal de 300 min-1 foi selecionado para a aplicação. O motor deve ter um encoder de giro único com 2048 linhas EnDat. Motor e encoder devem possuir conectores giratórios.
O código (ee) para o sistema de encoder é E6.
O código (nnn) para velocidade nominal de 300 min-1 é 003.
O código (ff) para outras opções (conexão direta) é F0.
O número do modelo portanto é 8LTA93.E6003F000-0
Exemplo, Pedido 2
Exemplo, Pedido 2
Um motor síncrono trifásico (tipo 8LTJ97) com velocidade nominal de 500 min-1 foi selecionado para a aplicação. O motor deve ter vedação de óleo e um encoder EnDat multi-giro de 2048 linhas. O conector do motor deve ser direto. O conector do encoder deve ser giratório (angulado).
O código (ee) para o sistema de encoder é E7.
O código (nnn) para a velocidade nominal de 500 min-1 é 005.
O código (ff) para outras opções (vedação de óleo e direção da conexão) é F9.
O número do modelo do motor portanto é 8LTJ97.E7005F900-0