Tipo de refrigeración/construcción (b)
Tipo de refrigeración/construcción (b)
Los motores 8LTA disponen de refrigeración automática y están equipados con una brida de salida ISO. Estos motores deben instalarse en la superficie de disipación de calor (brida).
Los motores 8LTJ se basan en los motores con tipo de refrigeración A y son de refrigeración líquida. La refrigeración líquida aumenta el par nominal (MN), la corriente nominal (IN), el par estático (M0) y la corriente estática (I0) en un 70% en comparación con los respectivos motores con tipo de refrigeración A.
Los motores 8LTQ disponen de refrigeración automática y eje hueco. Estos motores deben instalarse en la superficie de disipación de calor (brida).
Los motores 8LTS se basan en los motores con tipo de refrigeración Q y son de refrigeración líquida. La refrigeración líquida aumenta el par nominal (MN), la corriente nominal (IN), el par estático (M0) y la corriente estática (I0) en un 70% en comparación con los respectivos motores con tipo de refrigeración Q.
Tamaño (c)
Tamaño (c)
Los motores síncronos trifásicos 8LT están disponibles en tamaño 9 y C.
Tipo de refrigeración | Tamaños disponibles | |
|---|---|---|
9 | C | |
A | Sí | Sí |
J | Sí | Sí |
Q | Sí | Sí |
S | Sí | Sí |
Longitud (d)
Longitud (d)
Los motores síncronos trifásicos 8LT están disponibles hasta en seis longitudes distintas. Disponen de diferentes potencias nominales con idénticas dimensiones de la brida. Las diferentes longitudes se diferencian por un número (d) en el número de modelo (3, 4, 5, 6, 7, 8).
Longitud | Disponible para el tamaño | |
|---|---|---|
9 | C | |
3 | Sí | Sí |
4 | Sí | Sí |
5 | Sí | Sí |
6 | Sí | Sí |
7 | Sí | Sí |
8 | --- | Sí |
Sistema de encoder (ee)
Sistema de encoder (ee)
Encoders EnDat
EnDat es un estándar desarrollado por Johannes Heidenhain GmbH que incorpora las ventajas de la medición de las posiciones absoluta e incremental y que también ofrece una memoria de parámetros de lectura/escritura en el encoder. Con la medición de la posición absoluta (de la que se hace un muestreo en serie), no suele ser necesario el procedimiento de referenciado. Si es necesario, debe instalarse un encoder multivuelta (4096 revoluciones). Sin embargo, también es posible utilizar un encoder de una vuelta junto con el interruptor de referencia. En este caso, sí debe llevarse a cabo el procedimiento de referenciado. El proceso incremental permite los cortos tiempos de retardo necesarios para la medición de posición en los casos en los que se usan servoaccionamientos con propiedades dinámicas excepcionales.
Es posible utilizar diferentes tipos de encoders EnDat, dependiendo de los requisitos:
Nombre | Código de pedido (ee) | |
|---|---|---|
E6 | E7 | |
Tipo de encoder | EnDat de una vuelta | EnDat multivuelta |
Principio opertaivo | Óptica | Óptica |
Protocolo EnDat | EnDat 2.1 | EnDat 2.1 |
Resolución | 2048 líneas | 2048 líneas |
Identificable | --- | 4096 |
Precisión | ±20" | ±20" |
Frecuencia de corte | ≥ 400 kHz (-3 dB) | ≥ 400 kHz (-3 dB) |
Vibraciones en funcionamiento | ≤150 m/s² (IEC 60 068-2-6) | ≤150 m/s² (IEC 60 068-2-6) |
Impactos en funcionamiento | ≤1000 m/s² (IEC 60 068-2-27) | ≤1000 m/s² (IEC 60 068-2-27) |
Fabricante Dirección de Internet | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
ID de producto del fabricante | ECN1313 | EQN1325 |
Encoder EnDat 2.2
Información general
Los servoaccionamientos digitales y los lazos de control de posición con dispositivos de medición requieren una transferencia de datos rápida y segura. Además, también deben suministrarse otros datos como las características específicas del servoaccionamiento, las tablas de corrección, etc. Para garantizar un alto nivel de seguridad del sistema, los dispositivos de medición deben estar integrados en rutinas de detección de errores y ofrecer opciones de diagnóstico.
EnDat de HEIDENHAIN es un interface digital bidireccional para dispositivos de medición. Es capaz de emitir valores de posición de los dispositivos de medición incrementales y absolutos y también puede leer, actualizar o almacenar información nueva guardada en el dispositivo de medición. Sólo se necesitan 4 cables de señal debido a que se utiliza la transferencia de datos en serie. Los datos se transfieren de forma sincronizada a la señal de reloj definida por el propio equipo que lo gestiona. El método de la transferencia de información (valores de posición, parámetros, diagnóstico, etc.) se selecciona utilizando comandos de modo enviados al dispositivo de medición por el propio equipo que lo gestiona.
Datos técnicos
Se pueden utilizar encoders EnDat 2.2 (de una vuelta o multivuelta) dependiendo de la aplicación.
Nombre | Código de pedido (ee) | |
|---|---|---|
D0 | D1 | |
Tipo de encoder | EnDat de una vuelta | EnDat multivuelta |
Funcionalidad | Óptica | Óptica |
Protocolo EnDat | EnDat 2.2 | EnDat 2.2 |
Valores de posición por revolución | 33 554 432 (25 bits) | 33 554 432 (25 bits) |
Revoluciones reconocibles | --- | 4096 |
Precisión | ± 20" | ± 20" |
Vibraciones en funcionamiento1) | ≤ 300 m/s2 (IEC 60 068-2-6) | ≤ 300 m/s2 (IEC 60 068-2-6) |
Impactos en funcionamiento Duración de 6 ms | ≤ 1000 m/s2 / ≤ 2000 m/s2 (IEC 60 068-2-27) | ≤ 1000 m/s2 / ≤ 2000 m/s2 (IEC 60 068-2-27) |
Fabricante Sitio web | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
ID del fabricante | ECN 1325 | EQN 1337 |
| 1) | Válido de acuerdo con el estándar a temperatura ambiente; válido hasta 100 °C a temperatura de trabajo: ≤ 300 m/s2, hasta 115 °C: ≤ 150 m/s2; de 10 a 55 Hz, constante de trayectoria de 4.9 mm de pico a pico |
Encoder EnDat 2.2: sistemas de medición de posición con seguridad
Información general
En la fabricación de máquinas y sistemas, el tema de la seguridad se está volviendo cada vez más importante. Esto se refleja en la legislación y los criterios de seguridad cada vez más estrictos de las normativas nacionales e internacionales. Unos requisitos más estrictos sirven para proteger al personal, pero también la propiedad y el medio ambiente. El objetivo de la seguridad funcional es reducir al mínimo o eliminar las situaciones peligrosas que pueden producirse en máquinas y sistemas, ya sea por errores de manejo u otros. Esto se consigue generalmente mediante la implementación de sistemas redundantes. Para mover los ejes en aplicaciones de seguridad se requiere información de posición con el fin de poder aplicar las funciones de seguridad correspondientes. Es posible implementar diferentes configuraciones del sistema para obtener valores de posición independientes. Una posibilidad es usar dos dispositivos de medición por eje. Para mantener bajos los costes, a menudo suele crearse una solución con un sólo dispositivo de medición de posición. Hasta ahora, se han utilizado dispositivos de medición analógicos con señales seno/coseno.
La información sobre el área de aplicación y el procedimiento para la configuración de varias funciones de seguridad se puede consultar en el manual de usuario del "ACOPOSmulti with SafeMC". (Número de modelo> MAACPMSAFEMC-GERACOPOSmulti con Safe MC o en la sección de descargas de nuestra página web.
Datos técnicos
Se pueden utilizar encoders de seguridad funcionales EnDat 2.2 (de una vuelta o multivuelta) dependiendo de la aplicación.
Nombre | Código de pedido (ee) | |
|---|---|---|
S0 | S1 | |
Tipo de encoder | Seguridad funcional con EnDat de una vuelta | Seguridad funcional con EnDat multivuelta |
Principio operativo | Óptica | Óptica |
Protocolo EnDat | EnDat 2.2 | EnDat 2.2 |
Valores de posición por revolución | 33 554 432 (25 bits) | 33 554 432 (25 bits) |
Revoluciones reconocibles | --- | 4096 |
Precisión | ±20" | ±20" |
Vibraciones en funcionamiento1) | ≤ 300 m/s 2 (IEC 60068-2-6) | ≤ 300 m/s2 (IEC 60 068-2-6) |
Impactos durante el funcionamiento Duración de 6 ms | ≤ 2000 m/s2 (IEC 60 068-2-27) | ≤ 2000 m/s2 (IEC 60 068-2-27) |
Fabricante Dirección de Internet | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
ID del fabricante | ECN 1325 | EQN 1337 |
| 1) | De acuerdo con el estándar de temperatura ambiente; los siguientes valores son válidos para temperaturas de trabajo de hasta 100 °C: ≤ 300 m/s2, hasta 115°C: ≤150 m/s 2; de 10 a 55 Hz, constante de trayectoria de 4.9 mm de pico a pico |
Velocidad nominal (nnn)
Velocidad nominal (nnn)
Los motores síncronos trifásicos 8LT se pueden entregar con tres tipos de velocidad nominal:
Tamaño | Velocidades nominales disponibles nN [min-1] | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
80 / 100 | 300 | 500 | 1000 | |||||||||||||||||||
9 | --- | --- | --- | --- | --- | --- | Sí | Sí | Sí | Sí | Sí | --- | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí |
C | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | Sí | --- | --- | --- | --- | --- |
Longitud | 3 | 4 | 5 | 6 | 7 | 8 | 3 | 4 | 5 | 6 | 7 | 8 | 3 | 4 | 5 | 6 | 7 | 3 | 4 | 5 | 6 | 7 |
Junta de aceite (ff)
Junta de aceite (ff)
Todos los motores síncronos trifásicos 8LT están disponibles con junta de aceite opcional tipo A, de acuerdo con la Normativa DIN 3760. Cuando están equipados con una junta de aceite, los motores tienen protección IP65, de acuerdo con la Normativa IEC 60034-5.
Debe garantizarse una lubricación adecuada de la junta de aceite en todo el ciclo de vida del motor.
Opciones de motor especiales (gg)
Opciones de motor especiales (gg)
00...Ninguna opción del motor especial
Versión del motor (h)
Versión del motor (h)
El configurador especifica de forma automática la versión del motor que se incluye en los datos técnicos.
Código de pedido de las opciones de motor (ff)
El código determinado (ff) para la clave de pedido se puede encontrar en la siguiente tabla:
Opciones del motor | |||
|---|---|---|---|
Extremo del eje | Dirección de conexión | Junta de aceite | Código para clave de pedido (ff) |
ISO/eje hueco | Conectores del motor y el encoder, en ángulo (giratorios) | No | F0 |
Sí | F3 | ||
Conector del motor, recto - Conector del encoder, giratorio (en ángulo) | No | F6 | |
Sí | F9 | ||
Ejemplo de pedido 1
Ejemplo de pedido 1
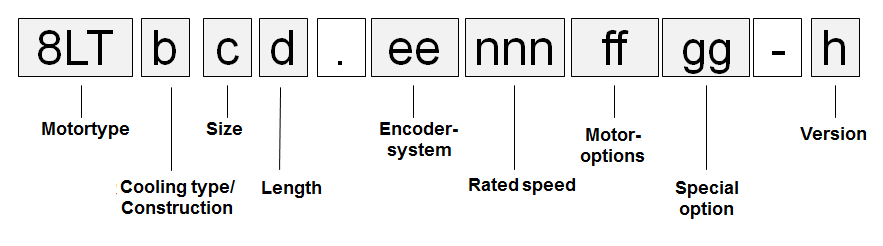
Se ha seleccionado para una aplicación un motor de par (tipo 8LTA93) con una velocidad nominal de 300 min-1. El motor debe disponer de un encoder de una vuelta EnDat de 2048 líneas. Tanto los conectores del encoder como del motor deben ser giratorios.
El código (ee) para el sistema de encoder es E6.
El código (nnn) para una velocidad nominal de 300 min-1 es 003.
El código (ff) para otras opciones (dirección de conexión) es F0.
El número de modelo del motor requerido es 8LTA93.E6003F000-0
Ejemplo de pedido 2
Ejemplo de pedido 2
Se ha seleccionado para una aplicación un motor síncrono trifásico (tipo 8LTJ97) con una velocidad nominal de 500 min-1. El motor debe disponer de junta de aceite y un encoder multivuelta EnDat de 2048 líneas. El conector del motor debe disponer de conexión directa. El conector del encoder debe disponer de conexión "giratoria (en ángulo)".
El código (ee) para el sistema de encoder es E7.
El código (nnn) para una velocidad nominal de 500 min-1 es 005.
El código (ff) para las otras opciones (junta de aceite y dirección de conexión) es F9.
El número de modelo del motor requerido es 8LTJ97.E7005F900-0