8JS | b | c | d | . | ee | nnn | ff | gg | - | h | ||||||||||||||||
Kühlart / Bauform | ||||||||||||||||||||||||||
Baugröße | ||||||||||||||||||||||||||
Baulänge | ||||||||||||||||||||||||||
Motorgebersystem | ||||||||||||||||||||||||||
Nenndrehzahl | ||||||||||||||||||||||||||
Motoroptionen | ||||||||||||||||||||||||||
Sondermotoroptionen | ||||||||||||||||||||||||||
Motorversion | ||||||||||||||||||||||||||
Bestellschlüssel geben nur in Ausnahmefällen Aufschluss über die möglichen Kombinationen.
Informationen zur Kombinierbarkeit sind im CAD-Konfigurator abrufbar.
Weitere Informationen
Synchronmotoren 8JSA
Allgemeine Motordaten 8JSA
Bestellschlüssel 8JSA
Kühlart/ Bauform (b)
Kühlart/ Bauform (b)
 | Kühlart 8JSA ist selbstgekühlt und hat eine schlanke, längliche Bauform. Diese Motoren müssen mit dem Anbauflansch, der gleichzeitig auch als Kühlfläche dient, an die Maschine angebaut werden. |
Baugröße (c)
Baugröße (c)
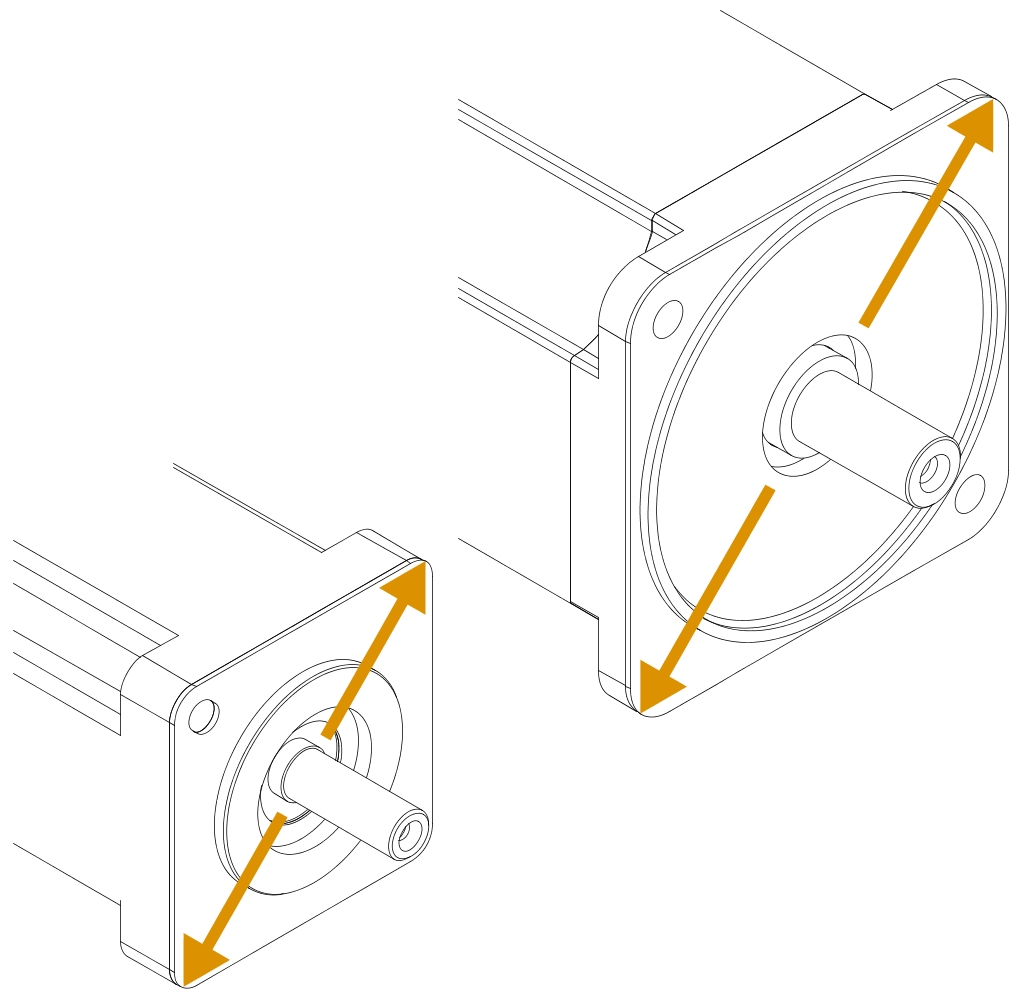 | Drehstrom-Synchronmotoren 8JSA sind in sechs verschiedenen Baugrößen (2 ... 7) erhältlich. Diese unterscheiden sich in den Abmessungen (insbesondere den Flanschabmessungen) und in den Leistungsdaten. Die Baugrößen werden durch eine Ziffer (c) in der Bestellbezeichnung unterschieden. Je größer diese Ziffer, desto größer sind die Flanschabmessungen und Leistungsdaten des jeweiligen Motors. |
Verfügbarkeit
Kühlart | verfügbare Baugrößen (c) | |||||
|---|---|---|---|---|---|---|
8JSA2 | 8JSA3 | 8JSA4 | 8JSA5 | 8JSA6 | 8JSA7 | |
A | Ja | Ja | Ja | Ja | Ja | Ja |
Baulänge (d)
Baulänge (d)
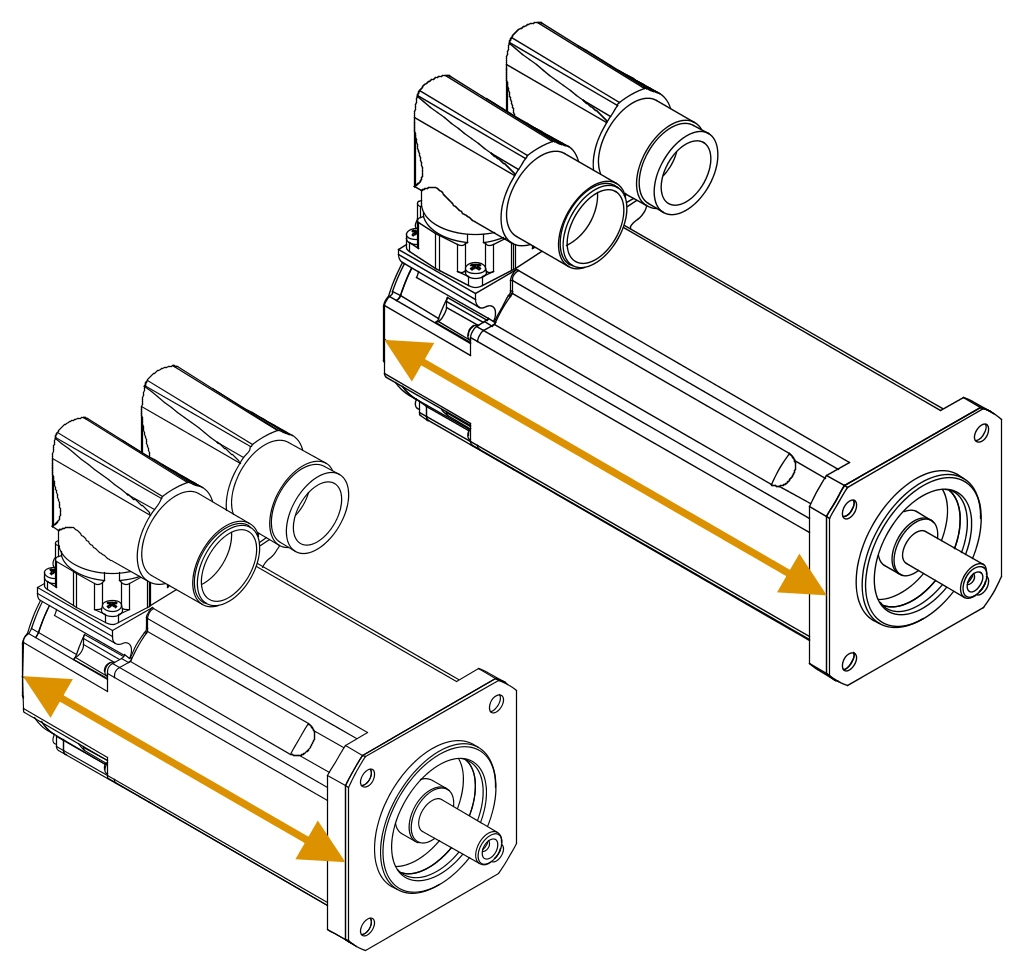 | Drehstrom-Synchronmotoren 8JSA sind in bis zu fünf verschiedenen Baulängen erhältlich. Diese unterscheiden sich in den Leistungsdaten bei identischen Flanschabmessungen. Die verschiedenen Baulängen werden durch eine Ziffer (d) in der Bestellbezeichnung unterschieden. |
Verfügbarkeit
Verfügbare Baulängen (d) | |||||
|---|---|---|---|---|---|
Baugröße | 8JSAx1 | 8JSAx2 | 8JSAx3 | 8JSAx4 | 8JSAx5 |
8JSA2 | --- | Ja | --- | Ja | --- |
8JSA3 | Ja | Ja | Ja | --- | --- |
8JSA4 | --- | Ja | Ja | Ja | --- |
8JSA5 | Ja | Ja | --- | Ja | --- |
8JSA6 | --- | Ja | Ja | Ja | Ja |
8JSA7 | --- | Ja | Ja | Ja | --- |
Gebersysteme (ee)
Gebersysteme (ee)
Resolver
Allgemeines
In den Servomotoren werden Resolver des Typs BRX eingesetzt. Diese Resolver werden mit einem einzigen Sinussignal (Referenzsignal) gespeist und liefern als Ergebnis zwei sinusförmige Signale, deren Amplitude sich mit der Winkelstellung sinus - bzw. cosinusförmig ändert.
Technische Daten
Bezeichnung | Bestellcode (ee) |
|---|---|
R0 | |
Genauigkeit | 10 Winkelminuten |
Vibration in Betrieb | ≤ 100 m/s² |
Schock in Betrieb | ≤ 400 m/s² |
EnDat Geber
Allgemeines
EnDat ist ein von der Johannes Heidenhain GmbH (www.heidenhain.de) entwickelter Standard, der die Vorteile von absoluter und inkrementeller Positionsmessung in sich vereint und darüber hinaus noch einen schreib- und lesbaren Parameterspeicher im Geber zur Verfügung stellt. Durch die absolute Positionsmessung (Absolutposition wird seriell eingelesen) entfällt gewöhnlich die Referenzfahrt. Gegebenenfalls ist ein Multiturn-Geber (4096 Umdrehungen) einzusetzen. Um Kosten zu sparen, kann aber auch ein Singleturn-Geber zusammen mit einem Referenzschalter verwendet werden. In diesem Fall muss allerdings eine Referenzfahrt durchgeführt werden. Das inkrementelle Verfahren ermöglicht die für hochdynamische Antriebe notwendigen kurzen Verzögerungszeiten bei der Lagemessung. Durch die sinusförmigen Inkrementalsignale und die Feinauflösung im EnDat-Modul erreicht man trotz moderater Signalfrequenzen eine sehr hohe Positionsauflösung.
Technische Daten
Je nach Anforderung können verschiedene Typen von EnDat 2.1 Gebern zum Einsatz kommen:
Bezeichnung | ||||||||
|---|---|---|---|---|---|---|---|---|
E4 1) | E5 1) | E6 2) | E7 2) | E8 1) | E9 1) | EA 2) | EB 2) | |
Gebertyp | EnDat Singleturn | EnDat Multiturn | EnDat Singleturn | EnDat Multiturn | EnDat Singleturn | EnDat Multiturn | EnDat Singleturn | EnDat Multiturn |
Funktionsprinzip | Optisch | Optisch | Optisch | Optisch | Induktiv | Induktiv | Induktiv | Induktiv |
EnDat Protokoll | EnDat 2.1 | EnDat 2.1 | EnDat 2.1 | EnDat 2.1 | EnDat 2.1 | EnDat 2.1 | EnDat 2.1 | EnDat 2.1 |
Auflösung | 512 Strich | 512 Strich | 2048 Strich | 2048 Strich | 16 Strich | 16 Strich | 32 Strich | 32 Strich |
Unterscheidbare Umdrehungen | --- | 4096 | --- | 4096 | --- | 4096 | --- | 4096 |
Genauigkeit | ±60“ | ±60“ | ±20“ | ±20“ | ±480“ | ±480“ | ±180“ | ±180“ |
Grenzfrequenz | ≥ 200 kHz (-3 dB) | ≥ 200 kHz (-3 dB) | ≥ 400 kHz (-3 dB) | ≥ 400 kHz (-3 dB) | ≥ 6 kHz (-3 dB) | ≥ 6 kHz (-3 dB) | ≥ 6 kHz (-3 dB) | ≥ 6 kHz (-3 dB) |
Vibration in Betrieb3) 55 < f ≤ 2000 Hz | ≤ 100 m/s² | ≤ 100 m/s² | ≤ 150 m/s² | ≤ 150 m/s² | ≤ 300 m/s² | ≤ 300 m/s² | ≤ 200 m/s² | ≤ 200 m/s² |
Schock in Betrieb4) Dauer 6 ms | ≤ 1000 m/s² | ≤ 1000 m/s² | ≤ 1000 m/s² | ≤ 1000 m/s² | ≤ 1000 m/s² | ≤ 1000 m/s² | ≤ 2000 m/s² | ≤ 2000 m/s² |
Hersteller Internetadresse | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |||||||
Herstellerbezeichnung | ECN1113 | EQN1125 | ECN1313 | EQN1325 | ECI1118 | EQI1130 | ECI1319 | EQI1331 |
| 1) | Nur für Motoren der Baugrößen 2 und 3 verfügbar. |
| 2) | Nur für Motoren der Baugrößen 4, 5, 6 und 7 verfügbar. |
| 3) | Nach IEC 60 068-2-6 |
| 4) | Nach IEC 60 068-2-27 |
Nenndrehzahl (nnn)
Nenndrehzahl (nnn)
Die Drehstrom-Synchronmotoren 8JSA sind je nach Baugröße und Baulänge mit verschiedenen Nenndrehzahlen lieferbar:
Baugröße | Baulängen | ||||
|---|---|---|---|---|---|
1 | 2 | 3 | 4 | 5 | |
2 | --- | 8000 | --- | 8000 | --- |
3 | 5000 | 3000, 5500 | 4500 | --- | --- |
4 | --- | 3500 | 5000 | 4000 | --- |
5 | 4500 | 4500 | --- | 2750, 5000 | --- |
6 | --- | 3000 | 2250 | 3000 | 2500 |
7 | --- | 2000 | 2400 | 1800 | --- |
Motoroptionen (ff)
Wellendichtring (ff)
Wellendichtring (ff)
Alle Drehstrom-Synchronmotoren 8JSA sind optional mit einem Wellendichtring der Form A nach DIN 3760 lieferbar.
Mit Wellendichtring erfüllen die Motoren die Schutzart IP65 nach EN 60034-5.
Für eine ausreichende Schmierung des Wellendichtrings ist während der gesamten Lebensdauer des Motors zu sorgen.
Haltebremse (ff)
Haltebremse (ff)
Alle Drehstrom-Synchronmotoren 8JSA können mit einer Haltebremse geliefert werden. Diese ist direkt hinter dem B-Lager des Motors eingebaut und dient zum Festhalten der Motorwelle im spannungslosen Zustand des Servomotors.
Funktionsprinzip
Die Haltebremse ist eine Federkraftbremse und wird durch den ACOPOS Servoverstärker oder ein ACOPOSmulti Wechselrichtermodul angesteuert. Prinzipbedingt weist dieser Haltebremsen-Typ ein minimales Spiel auf.
Die Bremse ist als Haltebremse konzipiert. Sie darf nicht zum betriebsmäßigen Abbremsen verwendet werden! Die Bremsen besitzen unter Beachtung dieser Randbedingung eine Lebensdauer von ca. 5000000 Schaltzyklen (Lösen und Wiedereinfallen lassen ist dabei ein Schaltzyklus). Lastbremsungen im Fall eines Nothaltes sind zulässig - sie reduzieren jedoch die Lebensdauer. Das erforderliche Haltemoment der Bremse wird auf Basis des auftretenden Lastmoments bestimmt. Ist das Lastmoment nicht ausreichend bekannt, wird empfohlen, einen Sicherheitsfaktor von 2 zu berücksichtigen.
Technische Daten der Standardhaltebremse
Bezeichnung | Baugröße des Motors | |||||
|---|---|---|---|---|---|---|
2 | 3 | 4 | 5 | 6 | 7 | |
Haltemoment MBr [Nm] | 1.42 | 2.5 | 5.3 | 14.5 | 25 | 53 |
Anschluss-Leistung Pein [W] | 8.4 ±7 % | 10.1 ±7 % | 12.8 ±7 % | 19.5 ±7 % | 25.7 ±7 % | 35.6 ±7 % |
Anschluss-Strom Iein [A] | 0.35 | 0.42 | 0.53 | 0.82 | 1.07 | 1.48 |
Anschluss-Spannung Uein [V] (+6% / -10%) | 24 VDC | 24 VDC | 24 VDC | 24 VDC | 24 VDC | 24 VDC |
Trägheitsmoment JBr [kgcm²] | 0.011 | 0.011 | 0.068 | 0.173 | 0.61 | 1.64 |
Masse mBr [kg] | 0.27 | 0.35 | 0.63 | 1.1 | 2 | 2.9 |
Wellenende (ff)
Wellenende (ff)
Alle Drehstrom-Synchronmotoren 8JSA besitzen Wellenenden nach DIN 748 und können mit glattem Wellenende oder mit Passfeder geliefert werden.
Glattes Wellenende
Das glatte Wellenende wird für eine kraftschlüssige Welle-Nabe-Verbindung verwendet und gewährleistet eine spielfreie Verbindung zwischen Welle und Nabe sowie hohe Laufruhe. An der Stirnseite der Welle ist eine Zentrierbohrung mit Gewinde vorhanden.
Wellenende mit Passfeder
Das Wellenende mit Passfeder kann für eine formschlüssige Drehmomentübertragung bei geringen Anforderungen an die Welle-Nabe-Verbindung und für die Aufnahme richtungskonstanter Drehmomente verwendet werden.
Die Passfedernuten der Drehstrom-Synchronmotoren 8JS entsprechen der Nutform N1 nach DIN 6885-1. Es werden Passfedern der Form A nach DIN 6885-1 eingesetzt. Die Wuchtung von Motoren mit Passfedernuten erfolgt nach der Halb-Passfeder-Vereinbarung nach ISO 1940/1, G6.3.
Zur Fixierung von Antriebselementen mit Wellenendscheiben ist an der Stirnseite der Welle eine Zentrierbohrung mit Gewinde vorgesehen.
Bestellcode Motoroptionen (ff)
Der entsprechende Code (ff) für den Bestellschlüssel kann der folgenden Tabelle entnommen werden:
Motoroption | ||||
|---|---|---|---|---|
Anschlussrichtung | Wellendichtring | Haltebremse | Wellenende | Code für Bestellschlüssel (ff) |
gewinkelt (drehbar) | nein | nein | glatt | D0 |
mit Passfeder | D1 | |||
normal | glatt | D2 | ||
mit Passfeder | D3 | |||
ja | nein | glatt | D6 | |
mit Passfeder | D7 | |||
normal | glatt | D8 | ||
mit Passfeder | D9 | |||
Reduktion der Nenndaten je nach Motoroption
Je nach gewählter Motoroption reduzieren sich die Nenndaten (Stillstandsmoment M0 und Nennmoment Mn) des Motors wie nach folgender Tabelle: (alle Werte in [Nm])
Motor | Haltebremse | EnDAT Geber | Haltebremse und EnDAT Geber | Wellendichtring |
|---|---|---|---|---|
8JSA22.eennnffgg-0 | 0,01 | 0 | 0,02 | 0,047 |
8JSA24.eennnffgg-0 | 0,05 | 0 | 0,12 | 0,047 |
8JSA31.eennnffgg-0 | 0 | 0 | 0 | 0,047 |
8JSA32.eennnffgg-0 | 0,05 | 0 | 0,1 | 0,047 |
8JSA33.eennnffgg-0 | 0,1 | 0 | 0,2 | 0,047 |
8JSA42.eennnffgg-0 | 0,12 | 0,1 | 0,36 | 0,071 |
8JSA43.eennnffgg-0 | 0,12 | 0,2 | 0,55 | 0,071 |
8JSA44.eennnffgg-0 | 0,12 | 0,3 | 0,76 | 0,071 |
8JSA51.eennnffgg-0 | 0,15 | 0,15 | 0,39 | 0,13 |
8JSA52.eennnffgg-0 | 0,26 | 0,34 | 0,76 | 0,13 |
8JSA54.eennnffgg-0 | 0,43 | 0,86 | 1,55 | 0,13 |
8JSA62.eennnffgg-0 | 0,5 | 0,9 | 1,6 | 0,25 |
8JSA63.eennnffgg-0 | 0,9 | 1,2 | 2,4 | 0,25 |
8JSA64.eennnffgg-0 | 1,3 | 1,5 | 3,1 | 0,25 |
8JSA65.eennnffgg-0 | 1,7 | 1,8 | 4 | 0,25 |
8JSA72.eennnffgg-0 | 1 | 2 | 3,9 | 0,25 |
8JSA73.eennnffgg-0 | 1 | 2,7 | 5,1 | 0,25 |
8JSA74.eennnffgg-0 | 1 | 3,4 | 6,2 | 0,25 |
Sondermotoroptionen (gg)
Sondermotoroptionen (gg)
00...keine Sondermotoroptionen
Motorversion (h)
Motorversion (h)
Die Motorversion wird automatisch vom Konfigurator vorgegeben und ist aus den technischen Daten ersichtlich.
Bestellbeispiel 1
Bestellbeispiel 1
Für eine Applikation wurde ein Drehstrom-Synchronmotor des Typs 8JSA44 mit einer Nenndrehzahl von 4000 min-1 ausgewählt. Zusätzlich soll der Motor mit einer Haltebremse ausgerüstet sein, über ein Wellenende mit Passfeder und über einen 2048-Strich EnDat Singleturn Geber verfügen.
Der Code (ee) für das Gebersystem ist E6.
Der Code (nnn) für die Nenndrehzahl von 4000 min-1 ist 040.
Der Code (ff) für die übrigen Optionen (Wellendichtring, Haltebremse, Welle mit Passfeder und Anschlussrichtung) ist D3.
Die Bestellnummer des benötigten Motors lautet daher: 8JSA44.E6040D300-0
Bestellbeispiel 2
Bestellbeispiel 2
Für eine Applikation wurde ein Drehstrom-Synchronmotor des Typs 8JSA54 mit einer Nenndrehzahl von 5000 min-1 ausgewählt. Zusätzlich soll der Motor mit einer Haltebremse ausgerüstet sein, über ein glattes Wellenende, einen Wellendichtring und über einen 2048-Strich EnDat Multiturn Geber verfügen.
Der Code (ee) für das Gebersystem ist E7.
Der Code (nnn) für die Nenndrehzahl von 5000 min-1 ist 050.
Der Code (ff) für die übrigen Optionen (Wellendichtring, Haltebremse, Welle mit Passfeder und Anschlussrichtung) ist D8.
Die Bestellnummer des benötigten Motors lautet daher: 8JSA54.E7050D800-0