Types de refroidissement
Types de refroidissement C et D
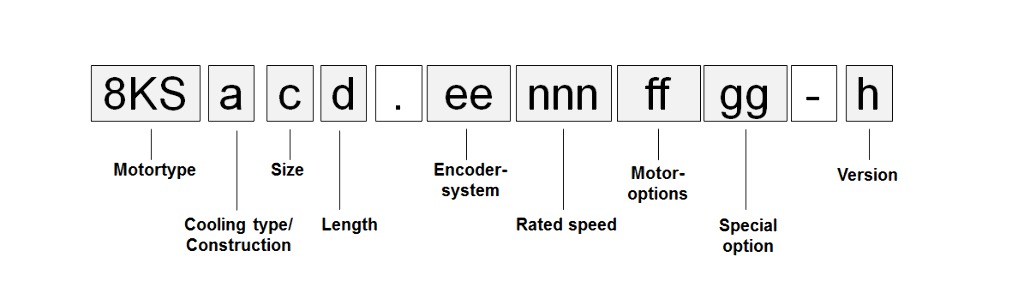
Les moteurs synchrones triphasés 8KS à refroidissement de type C ou D utilisent un refroidissement externe par ventilateur centrifuge. Deux sens de montage sont proposés (position A vers la gauche et position B vers la droite). Le refroidissement de type C permet un montage sur bride ou un montage sur socle de type B. Le refroidissement de type C permet un montage sur bride ou un montage sur socle sur les côtés A et B.
 |
Type de refroidissement J
Les moteurs synchrones triphasés 8KS à refroidissement de type J utilisent un refroidissement externe par refroidisseur à eau très efficace. Le modèle 8KSJ de taille 9 dispose de deux circuits de refroidissement indépendants. La raccordement des modèles 8KSJ de taille 8 s'effectue toujours à droite. Les modèles 8KSJ de taille 9 doivent toujours être raccordés des deux côtés. Les modèles 8KSJ permettent un montage sur bride ou un montage sur socle sur un socle de type B. Pour des raisons mécaniques, ce type de refroidissement ne permet pas le montage sur pieds sur le côté A.
Types de refroidissement L et M
Les moteurs synchrones triphasés 8KS à refroidissement de type L et M utilisent un refroidissement externe par ventilateur axial. Le refroidissement de type L permet un montage sur bride ou un montage sur socle sur un socle de type B. Le refroidissement de type M permet un montage sur bride ou un montage sur socle sur les côtés A et B.
Taille (c)
Taille (c)
Les moteurs 8KS sont disponibles en différentes tailles (8 ou 8 et 9), selon leur construction. Les différentes tailles sont indiquées par un chiffre (c) dans la référence produit. Plus le chiffre est grand, plus la bride est grande et la puissance nominale est élevée.
Type de refroidissement | Tailles disponibles | |
|---|---|---|
8 | 9 | |
C | Oui | Oui |
D | Oui | -- |
J | Oui | Oui |
L | Oui | Oui |
M | Oui | --- |
Longueur (d)
Longueur (d)
Les moteurs synchrones triphasés 8KS sont disponibles en quatre longueurs différentes. Les différentes longueurs sont indiquées par un chiffre (d) dans la référence produit.
Longueurs | Tailles disponibles | |
|---|---|---|
8 | 9 | |
2 | Oui | Oui |
4 | Oui | Oui |
5 | Oui | Oui |
6 | Oui | Oui |
Système codeur (ee)
Système codeur (ee)
Resolver
Les resolvers intégrés aux servomoteurs 8KS sont des resolvers LTN.
Nom | Code de commande (ee) |
|---|---|
R0 | |
Précision | ± 6’ |
Vibration pendant le fonctionnement | ≤ 500 m/s² |
Choc pendant le fonctionnement | ≤ 1000 m/s² |
Les valeurs maximales de choc doivent toujours être respectées.
Codeur EnDat 2.1
Le protocole EnDat est un standard développé par Johannes Heidenhain GmbH intégrant les avantages de la mesure de position absolue et incrémentale et offrant également une mémoire de paramètres accessible en lecture/écriture dans le codeur. Avec la mesure de position absolue (échantillonnage série de la position absolue), une procédure de mise en référence n’est généralement pas nécessaire. Un codeur multitour peut être nécessaire. Une solution moins coûteuse utilisant un codeur monotour avec procédure de mise en référence est également possible. Dans ce cas, une procédure de mise en référence doit être effectuée. Le processus incrémental permet d’obtenir les phases de décélérations courtes nécessaires à la mesure de position dans des applications très dynamiques. Avec le signal incrémental sinusoïdal et la résolution fine du module codeur EnDat, une très haute résolution de positionnement est atteinte, même si les fréquences de signal utilisées sont modérées.
Selon les besoins de l’application, différents types de codeurs EnDat 2.1 peuvent être utilisés :
Nom | Code de commande (ee) | |
|---|---|---|
E6 | E7 | |
Type de codeur | EnDat monotour | EnDat multitour |
Principe de fonctionnement | Optique | Optique |
Protocole EnDat | EnDat 2.1 | EnDat 2.1 |
Résolution | 2048 lignes | 2048 lignes |
Tours | --- | 4096 |
Nombre de fonctions | 2048 | 2048 |
Précision | ± 20" | ± 20" |
Fréquence de coupure | ≥400 kHz (-3 dB) | ≥400 kHz (-3 dB) |
Vibration en exploitation | ≤ 300 m/s² | ≤ 300 m/s² |
Choc en exploitation | ≤ 2000 m/s² | ≤ 2000 m/s² |
Référence produit du fabricant | ECN 1313 EnDat01 | EQN 1325 EnDat01 |
Codeur EnDat 2.2 – systèmes de mesure de position conforme aux exigences de sûreté fonctionnelle
La sécurité devient de plus en plus importante dans la production de machines et de systèmes. Ces exigences plus élevées se reflètent dans la législation et dans les critères de sécurité des normes nationales et internationales. Elles visent premièrement à protéger les personnes, mais concernent aussi de plus en plus les biens matériels et l’environnement. L’objectif de la sûreté fonctionnelle est de minimiser ou éliminer les situations dangereuses liées à l’utilisation de machines ou d’installations, lors de leur fonctionnement normal et en cas d’erreur. La redondance des systèmes est l’approche la plus courante. Le déplacement d’axes dans le cadre d’applications de sécurité nécessite des informations de position afin que les fonctions de sécurité correspondantes puissent être réalisées. Différentes configurations peuvent être utilisées pour obtenir des valeurs de position indépendantes. Une option consiste à utiliser deux appareils de mesure par axe. Toutefois, afin de réduire les coûts, on préfère souvent une solution dotée d’un seul appareil de mesure. Jusqu’à présent, des appareils de mesure analogiques sin-cos étaient utilisés. HEIDENHAIN, premier fabricant de systèmes de mesure à utiliser le protocole série EnDat 2.2 pour la mesure de position de sécurité, propose une solution à codeur unique série, de niveau SIL 2 selon IEC 61508. Les avantages du transfert de données en série, tels que l’optimisation des coûts, les possibilités de diagnostic, la mise en service automatique et la génération rapide des valeurs de position, sont désormais accessibles aux applications de sécurité.
Sur les codeurs rotatifs, le contrôle qualité intégral à la production et les mesures complémentaires lors de l’inspection finale garantissent l’absence d’erreur de connexion entre l’arbre et le système de mesure lors de l’utilisation de moteurs avec des codeurs S (conformément à la norme EN ISO 13849-2).
Les codeurs D (non sûrs) permettent cependant de réaliser un certain nombre de fonctions de sécurité.
Pour obtenir des informations sur les domaines d'application et sur la procédure de configuration des différentes fonctions de sécurité, veuillez consulter le manuel de l'utilisateur SafeMOTION (MAACPMSAFEMC-ENG) dans la section Téléchargements du site web de B&R www.br-automation.com.
Caractéristiques techniques
Les codeurs EnDat 2.2 monotours ou multitours, selon les besoins de l’application, peuvent être utilisés pour la sûreté fonctionnelle.
Nom | Code de commande (ee) | |
|---|---|---|
S0 | S1 | |
Type de codeur | EnDat monotour, sûreté fonctionnelle | EnDat multitour, sûreté fonctionnelle |
Principe de fonctionnement | Optique | Optique |
Protocole EnDat | EnDat 2.2 | EnDat 2.2 |
Valeurs de position par tour | 33 554 432 (25 bits) | 33 554 432 (25 bits) |
Tours reconnaissables | --- | 4096 |
Précision | ± 20" | ± 20" |
Vibration en exploitation 10 à 2000 Hz | ≤ 300 m/s2 (IEC 60068-2-6) | ≤ 300 m/s2 (IEC 60068-2-6) |
Choc pendant le fonctionnement durée 6 ms | ≤ 2000 m/s2 (IEC 60068-2-27) | ≤ 2000 m/s2 (IEC 60068-2-27) |
Référence produit du fabricant | ECN 1325 FS EnDat22 | EQN1337 FS EnDat22 |
Vitesse nominale (nnn)
Vitesse nominale (nnn)
Différentes vitesses nominales sont proposées pour les moteurs synchrones triphasés 8KS, selon leur taille et leur longueur.
Taille et longueur des moteurs | Vitesses nominales nN disponibles [tr/min] | ||||||
|---|---|---|---|---|---|---|---|
1000 | 1100 | 1500 | 1600 | 2000 | 2500 | 3000 | |
8KSC8 | -- | Oui | -- | Oui | Oui | Oui | Oui |
8KSD8 | -- | Oui | -- | Oui | Oui | Oui | Oui |
8KSL8 | -- | Oui | Oui | Oui | Oui | Oui | |
8KSM8 | -- | Oui | -- | Oui | Oui | Oui | Oui |
8KSC92,94 | Oui | -- | Oui | -- | Oui | Oui | Oui |
8KSC95 | Oui | -- | Oui | -- | Oui | Oui | -- |
8KSC96 | Oui | -- | Oui | -- | Oui | -- | -- |
8KSL92,94 | Oui | -- | Oui | -- | Oui | Oui | Oui |
8KSL95 | Oui | -- | Oui | -- | Oui | Oui | -- |
8KSL96 | Oui | -- | Oui | -- | Oui | -- | -- |
Taille et longueur des moteurs | Vitesses nominales nN disponibles [tr/min] | ||||
|---|---|---|---|---|---|
1000 | 1500 | 2000 | 2500 | 3000 | |
8KSJ82, 84, 85 | Oui | Oui | Oui | Oui | Oui |
8KSJ86 | Oui | Oui | Oui | Oui | -- |
8KSJ92 | Oui | Oui | Oui | Oui | -- |
8KSJ94 | Oui | Oui | Oui | -- | -- |
8KSJ95 | Oui | Oui | -- | -- | -- |
8KSJ96 | Oui | -- | -- | -- | -- |
Direction de raccordement
Direction de raccordement
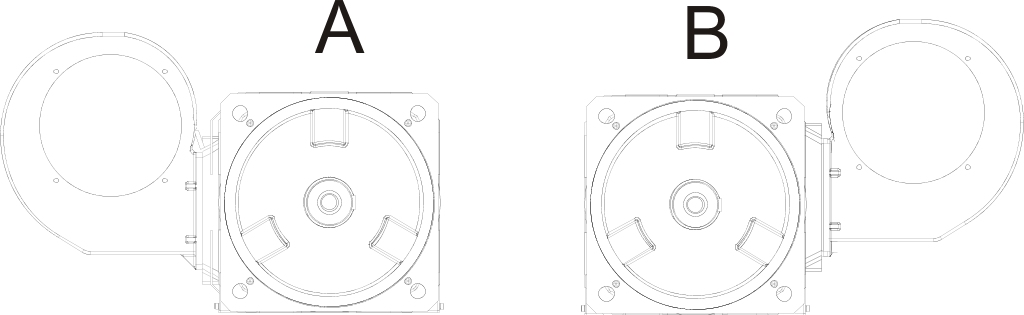
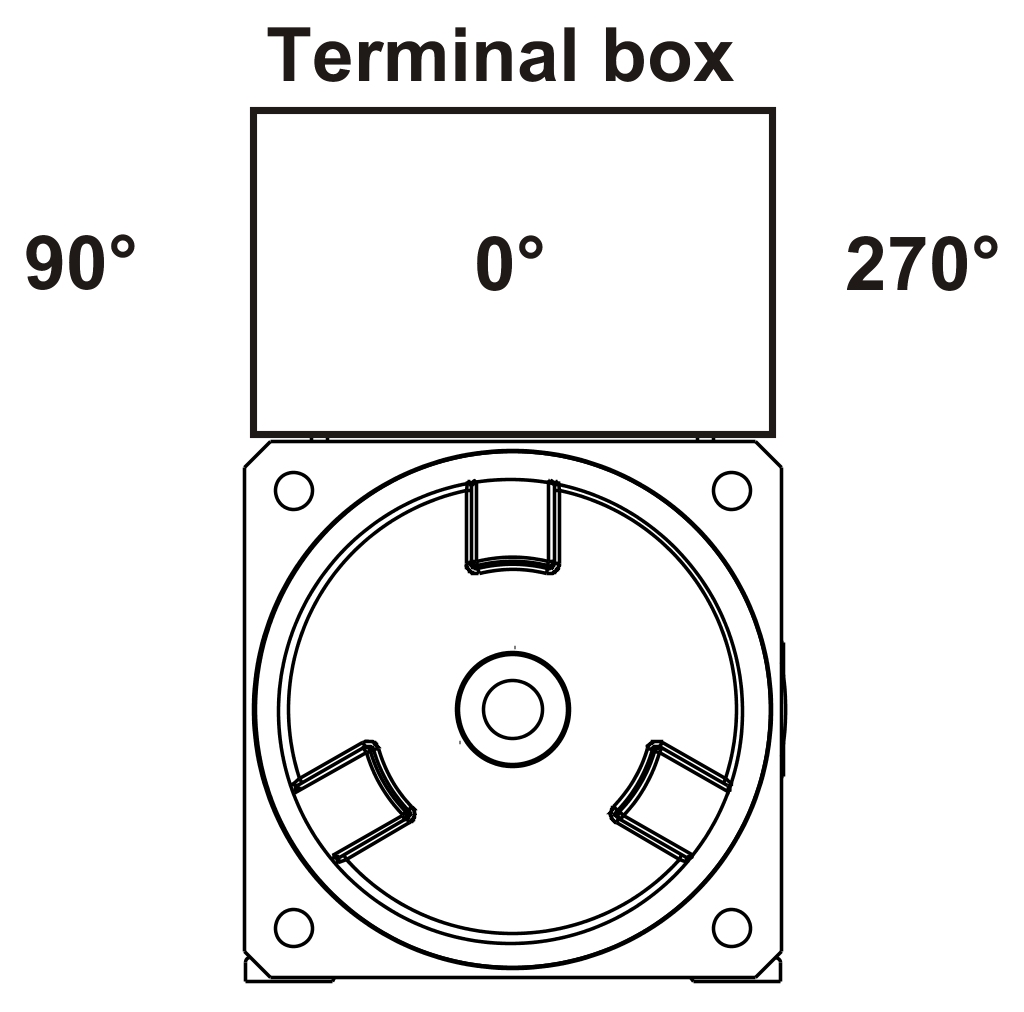
Le raccordement de l’alimentation des moteurs synchrones triphasés 8KS se fait généralement par bornier. Le bornier est situé sur le dessus du moteur et le connecteur est droit (ce qui correspond à 270°).
 |  |
Version moteur (h)
Version moteur (h)
La version du moteur est automatiquement spécifiée par le configurateur et indiquée dans les caractéristiques techniques.
Détermination du code de commande pour les options moteur (ff)
La désignation correspondante (ff) pour déterminer le code de commande se trouve dans le tableau suivant :
Options moteur pour les types de refroidissement C, D et J (ventilateurs centrifuges et refroidisseur à eau)
Option moteur | |||||
|---|---|---|---|---|---|
Direction de raccordement | Joint à huile | Frein de maintien | Extrémité d’arbre | Montage et direction de raccordement Système de refroidissement | Code de commande (ff) |
Bornier sur le dessus, sortie de câbles à 270° (droite) | Non | Non | Lisse | Ventilateur à gauche | A0 |
Clavetée | Ventilateur à gauche | A1 | |||
Standard | Lisse | Ventilateur à gauche | A2 | ||
Clavetée | Ventilateur à gauche | A3 | |||
Non | Lisse | Ventilateur/conduites d’eau à droite | B0 | ||
Clavetée | Ventilateur/conduites d’eau à droite | B1 | |||
Standard | Lisse | Ventilateur/conduites d’eau à droite | B2 | ||
Clavetée | Ventilateur/conduites d’eau à droite | B3 | |||
NOTE : Pour les moteurs 8KJS, seules les options B peuvent être sélectionnées, car les conduites d’eau des modèles 8KSJ8 sont toujours du côté droit. Les moteurs de taille 8KSJ9 doivent toujours être connectés des deux côtés, car deux circuits de refroidissement doivent être alimentés.
Options moteur pour les types de refroidissement L et M (ventilateurs axiaux)
Option moteur | |||||
|---|---|---|---|---|---|
Direction de raccordement | Joint à huile | Frein de maintien | Extrémité d’arbre | Montage et direction de raccordement du système de refroidissement | Code de commande (ff) |
Bornier sur le dessus, sortie de câbles à 270° (droite) | Non | Non | Lisse | Axial | C0 |
Clavetée | Axial | C1 | |||
Standard | Lisse | Axial | C2 | ||
Clavetée | Axial | C3 | |||
Types de montage avec les moteurs 8KS
Type de montage | Montage sur bride, ou sur pieds en position B | Montage sur bride, ou sur pieds en position A ou B | ||||
|---|---|---|---|---|---|---|
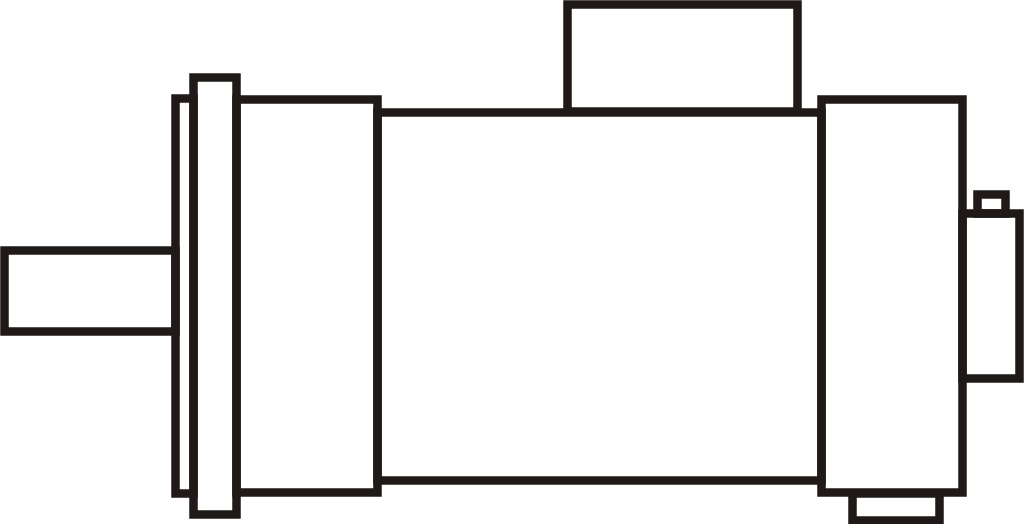 | 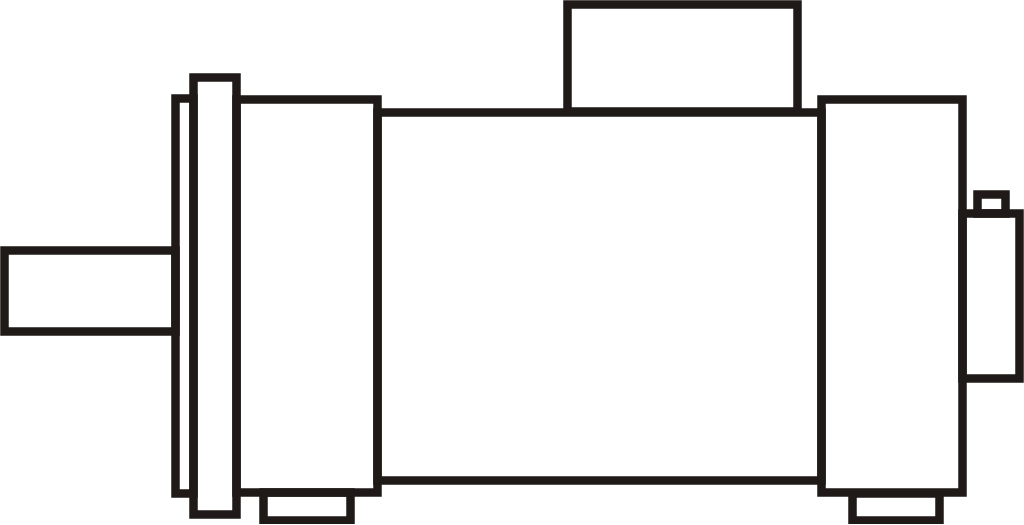 | |||||
8KSC | Oui | --- | ||||
8KSD | --- | Oui | ||||
8KSJ | Oui | --- | ||||
8KSL | Oui | --- | ||||
8KSM | --- | Oui | ||||
Options moteur spéciales (gg)
La désignation correspondante (gg) pour déterminer le code de commande est disponible dans le tableau suivant.
Options moteur spéciales | Code de commande |
|---|---|
Pas d’option moteur spéciale | 00 |
Roulements renforcés | 04 |
Filtre carré pour les ventilateurs centrifuges (types de refroidissement C et D) | 15 |
Exemple de commande 1
Exemple de commande 1
Un moteur synchrone triphasé 8KS de taille 84 a été choisi pour une application. Le moteur doit être équipé d’un socle côté A en plus du socle fourni de base côté B. Le code de commande est 8KSD. Un codeur monotour pour sûreté fonctionnelle a été choisi. La vitesse de rotation requise est de 2500 tr/min. Le ventilateur radial doit être monté du côté gauche du moteur. Le frein n’est pas nécessaire et l’extrémité de l’arbre doit être lisse. Le ventilateur doit être muni d’un filtre, qui est disponible en option moteur spéciale.
Le code (ee) pour le système de codeur est S0.
Le code (nnn) pour une vitesse nominale de 2500 tr/min est 025.
Le code (ff) pour l’option moteur 8KS avec ventilateur à gauche est toujours A. Tous les moteurs 8KS sont équipés d’un bornier (situé sur le dessus, avec sortie de câbles à 270° vers la droite). Le code pour un moteur sans frein de maintien et avec arbre lisse est0, le code des options moteur est donc A0.
Le code d’options moteur spéciales (gg) pour le filtre (filtre carré) est 15.
La référence produit pour le moteur requis est 8KSD84.S0025A015-0
Exemple de commande 2
Exemple de commande 2
Un moteur synchrone triphasé 8KSJ de taille 92 refroidi par eau a été choisi pour une application. Un codeur multitour pour sûreté fonctionnelle a été choisi. La vitesse de rotation requise est de 2000 tr/min. Le frein n’est pas nécessaire et l’extrémité de l’arbre doit être clavetée.
Le code (ee) pour le système de codeur est S1.
Le code (nnn) pour une vitesse nominale de 2000 tr/min est 020.
Le code (ff) pour l’option moteur 8KSJ refroidi par eau est toujours B. Tous les moteurs 8KS sont équipés d’un bornier (situé sur le dessus, avec sortie de câbles à 270° vers la droite). Le code pour un moteur sans frein de maintien et avec arbre claveté est1, le code des options moteur est donc B1.
Pas d’option moteur spéciale.
La référence produit pour le moteur requis est 8KSJ92.S1020B100-0